
A Surface Avatar projektet 2020-ban indították, és a Német Űrügynökség az Európai Űrügynökséggel (ESA) együttműködve vezeti. A projekt célja egy olyan technológia kifejlesztése, amely lehetővé teszi az űrhajósok számára, hogy önállóan és egyidejűleg több robotot irányítsanak nagy pontossággal, vagy hogy azokat félig vagy teljesen autonóm módon üzemeltessék az űrben. A remény az, hogy amikor az emberek ismét felfedezik a Hold felszínét és elkezdik a Mars felfedezését, ezeket a robotrendszereket fogják használni az expedíciók támogatására.
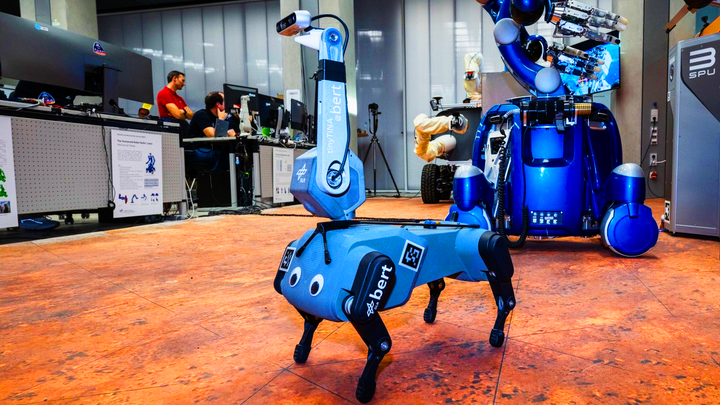
A kutyaszerű robot, Bert, egy űrhajóstól kap irányítási segítséget az űrben. (Fotó: ESA/Andreas Mogensen/X).
Ezért nemrég Marcus Wandt, az Európai Űrügynökség (ESA) Nemzetközi Űrállomásának (ISS) űrhajósa, először irányította az űrből Bertet, egy négylábú, kutyaszerű robotot. Marcus Wandt ezt a kísérletet annak tesztelésére végezte, hogy az időbeli késleltetések hogyan befolyásolják a robotok irányítását az űrküldetések során.
A tesztelés során Wandt a Nemzetközi Űrállomás (ISS) Columbus modulján tartózkodott, és a Bert robotot vezette, amely a Német Űrügynökség oberpfaffenhofeni létesítményének Mars-laboratóriumában volt. Egy sor teszt kimutatta, hogy Wandt három különböző robot irányítását vette át, és a Bert robottal kezdte.
Miután egy ideig átvette Bert irányítását, Wandt hagyta, hogy a robot önállóan felfedezzen egy szimulált környezetben, miközben átvette az irányítást a Német Űrügynökség kerekes humanoid szolgáltató robotja, a Rollin Justin, és az Európai Űrügynökség Interact Rovere felett is.

Marcus Wandt űrhajós sikeresen tesztelte Bert, egy négylábú, kutyaszerű robot irányítását. (Fotó: ESA/Andreas Mogensen/X).
A kísérlet, amelyben több robot vett részt, két és fél órán át tartott, és sikeresen befejeződött. A Német Űrügynökség projektigazgatója kijelentette: „Ha a Bert robot lábakon, és nem kerekeken működne, az lehetővé teheti, hogy az eszköz könnyebben másszon meg dombokat, vagy bemásszon barlangokba a Marson, vagy más földönkívüli világokban .”
A Német Űrügynökség egy másik tisztviselője megjegyezte, hogy eddig csak kerekes robotokat tudtak az űrhajósok távirányítással irányítani az űrből. Bert azonban számos járásmintát elsajátított, és rugalmas lábmozgásainak köszönhetően akár egyenetlen terepet, például barlangokat is képes felfedezni.
HUYNH DUNG (Forrás: Space/Europeanspaceflight)
[hirdetés_2]
Forrás

![[Kép] Hanoi városi élete a „perzselően forró” környezet kihívásai alatt](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2026/05/25/1779706979265_nang-nong-t5-2026-minh-duy-7-4636-jpg.webp)



![[Kép] Közeli kép a két gyorsforgalmi utat és a Long Thanh repülőteret összekötő csomópontról.](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2026/05/25/1779703378210_ndo_br_z7863716673926-224453a31600126cce10622af6290afd-4549-jpg.webp)































































































Hozzászólás (0)