

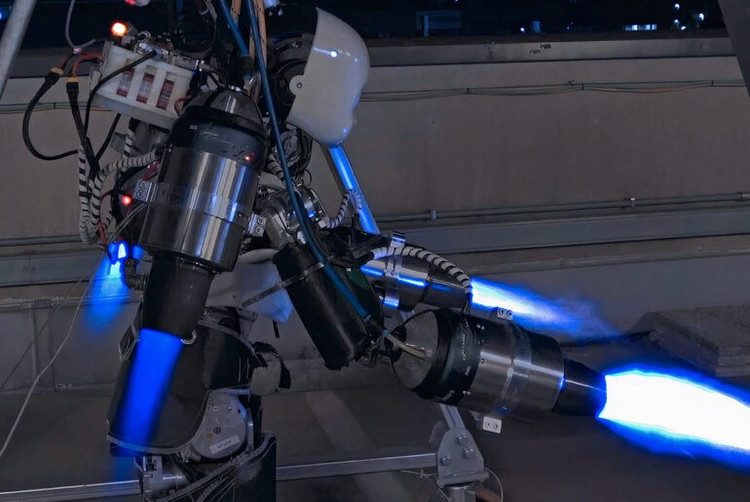
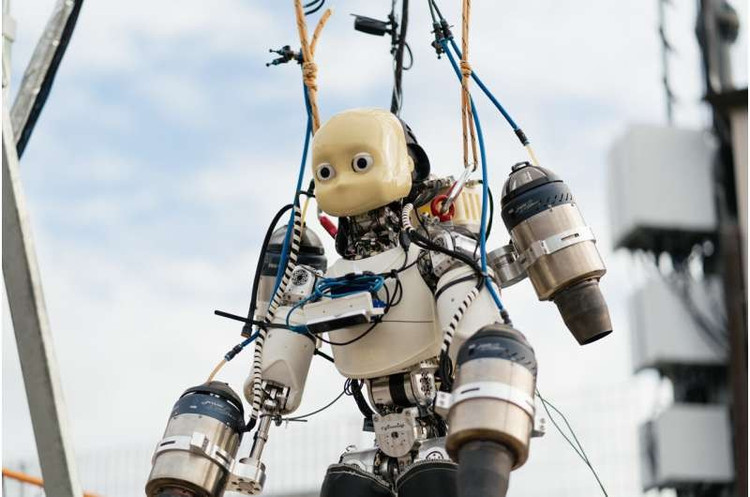
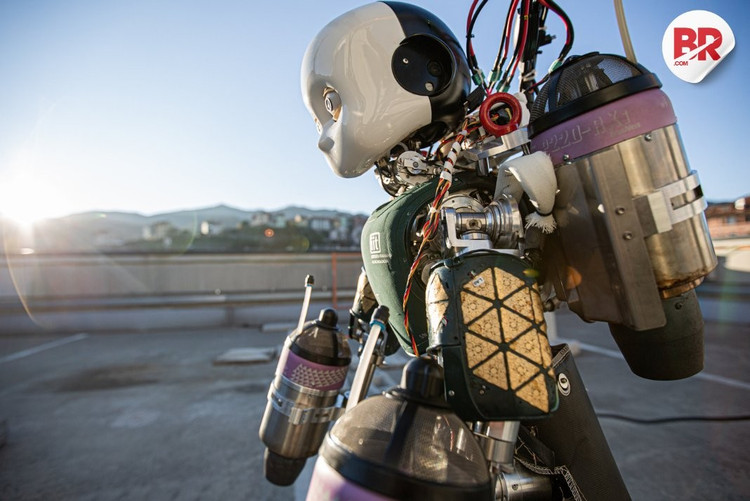
이는 제트 터빈을 사용하여 비행할 수 있는 세계 최초의 인간형 로봇인 iRonCub3를 개발한 이탈리아 공과대학(IIT)의 최신 업적입니다.
이 제품은 다중 지형 모바일 로봇 연구의 전환점을 의미하며, 특히 첨단 기술의 지원이 점점 더 필요한 구조 및 재난 대응 임무의 맥락에서 더욱 그렇습니다.

iRonCub3에는 팔에 두 개, 등에 두 개씩 총 네 개의 제트 엔진이 장착되어 있으며, 이 엔진은 1,000뉴턴 이상의 추력을 발생시켜 70kg의 로봇 몸체를 지면에서 들어 올릴 수 있습니다. 티타늄 척추와 내열 쉘은 최대 800°C의 고온 배기가스로부터 로봇을 보호하여 작동 중 안전을 보장합니다.
대칭적이고 안정적인 드론과 달리 로봇은 유연한 팔다리를 가진 인간형 모양을 가지고 있어 공기역학적 변동과 중심의 지속적인 변화를 일으킵니다.
이러한 과제를 해결하기 위해 IIT의 한 팀은 밀라노 폴리테크닉과 스탠포드 대학과 협력하여 시뮬레이션 데이터와 실제 데이터로 훈련된 신경망을 사용하는 AI 통합 비행 제어 시스템을 개발했습니다.
이를 통해 iRonCub3는 비행 자세를 조정하고, 난류에 대처하고, 이륙 중에 순차적으로 제트기를 발사할 수 있습니다.
이 로봇의 개발에는 "공동 설계" 기법이 적용되었으며, 최고의 비행 성능을 달성하기 위해 동체 형상과 엔진 장착 위치를 최적화했습니다. 일련의 시뮬레이션 테스트, 열 제어, 추력 센서, 이착륙 알고리즘을 면밀히 개선했습니다.
IIT의 기계 및 인공지능 연구소(AMI 랩) 소장인 다니엘레 푸치에 따르면, 이 로봇의 설계는 더욱 가혹하고 예측 불가능한 환경에서 그 역량을 확장하는 것을 목표로 합니다.

iRonCub는 재난 지역의 구조 임무, 위험한 환경 조사, 복잡한 구조의 밀폐된 공간에서의 자율 주행에 적용될 수 있습니다.
가까운 미래에 iRonCub3는 제노바 공항에서 야외 테스트를 계속할 것으로 예상되며, 이를 통해 비행 로봇 기술을 현실 세계에 통합하기 위한 추가 단계를 준비할 것입니다.
출처: https://khoahocdoisong.vn/robot-tien-hoa-co-the-bay-ma-khong-can-con-nguoi-post1550041.html




![[사진] 팜 민 찐 총리, 10호 태풍 피해 극복 위한 회의 주재](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/10/3/544f420dcc844463898fcbef46247d16)
![[사진] 빈민초등학교 학생들이 보름달 축제를 즐기며 어린 시절의 기쁨을 만끽하고 있다.](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/10/3/8cf8abef22fe4471be400a818912cb85)
















![[인포그래픽] 미국 정부 폐쇄 시기를 돌아보며](https://vphoto.vietnam.vn/thumb/402x226/vietnam/resource/IMAGE/2025/10/3/c467276604584d2889c0d2d84fecd986)









































































댓글 (0)