
Projekt Surface Avatar został uruchomiony w 2020 roku i jest realizowany przez Niemiecką Agencję Kosmiczną we współpracy z Europejską Agencją Kosmiczną (ESA). Celem projektu jest opracowanie technologii, która umożliwi astronautom niezależne i jednoczesne sterowanie wieloma robotami z wysoką precyzją lub sterowanie nimi w sposób półautonomiczny lub w pełni autonomiczny w przestrzeni kosmicznej. Nadzieją jest, że gdy ludzie ponownie eksplorują powierzchnię Księżyca i rozpoczną eksplorację Marsa, te systemy robotyczne zostaną wykorzystane do wsparcia tych wypraw.
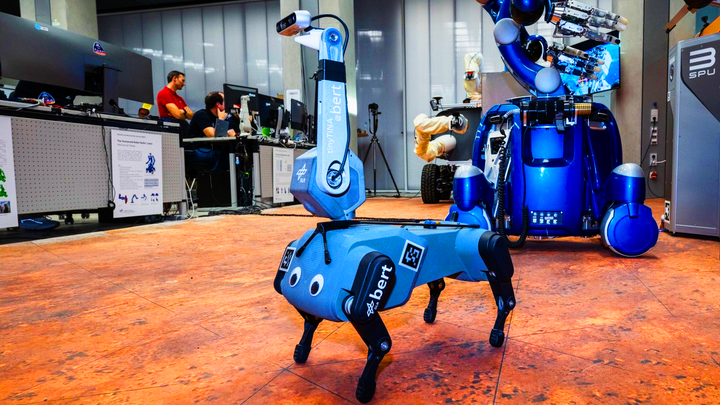
Robot Bert, przypominający psa, jest sterowany przez astronautę w kosmosie. (Zdjęcie: ESA/Andreas Mogensen/X).
Dlatego niedawno Marcus Wandt, astronauta Międzynarodowej Stacji Kosmicznej (ISS) Europejskiej Agencji Kosmicznej (ESA), po raz pierwszy pilotował Berta, czworonożnego robota przypominającego psa, z kosmosu. Marcus Wandt przeprowadził ten eksperyment, aby sprawdzić, jak opóźnienia czasowe wpływają na sterowanie robotem podczas misji kosmicznych.
Podczas testów Wandt znajdował się na pokładzie modułu Columbus Międzynarodowej Stacji Kosmicznej (ISS) i pilotował robota Bert, który znajdował się w Laboratorium Marsjańskim w ośrodku Niemieckiej Agencji Kosmicznej w Oberpfaffenhofen. Seria testów wykazała, że Wandt przejął kontrolę nad trzema różnymi robotami, a zaczął od robota Bert.
Po przejęciu na pewien czas kontroli nad Bertem, Wandt pozwolił robotowi na autonomiczne eksplorowanie symulowanego środowiska, a także przejął kontrolę nad kołowym humanoidalnym robotem usługowym Rollin Justin należącym do Niemieckiej Agencji Kosmicznej i Interact Rover należącym do Europejskiej Agencji Kosmicznej.

Astronauta Marcus Wandt pomyślnie przetestował sterowanie Bertem, czworonożnym robotem przypominającym psa. (Zdjęcie: ESA/Andreas Mogensen/X).
Eksperyment, w którym uczestniczyło wiele robotów, trwał dwie i pół godziny i zakończył się pełnym sukcesem. Dyrektor projektu z Niemieckiej Agencji Kosmicznej stwierdził: „Umożliwienie robotowi Bert poruszania się na nogach zamiast na kołach mogłoby ułatwić mu wspinanie się na wzgórza lub wchodzenie do jaskiń na Marsie i innych planetach pozaziemskich”.
Inny urzędnik Niemieckiej Agencji Kosmicznej zauważył, że do tej pory astronauci zdalnie sterowali z kosmosu jedynie robotami kołowymi. Bert opanował jednak kilka wzorców chodu, a dzięki elastycznym ruchom nóg może nawet eksplorować trudny teren, w tym jaskinie.
HUYNH DUNG (Źródło: Space/Europeanspaceflight)
Źródło










































































































Komentarz (0)