
 |
حطمت آلة حل مكعب روبيك، التي ابتكرها فريق من الطلاب، رقماً قياسياً عالمياً . الصورة: مقدمة من الفريق . |
حقق فريق من طلاب جامعة بيردو مؤخراً رقماً قياسياً عالمياً جديداً في موسوعة غينيس للأرقام القياسية، وذلك بفضل روبوت صمموه بأنفسهم، قادر على حل مكعب روبيك في 0.103 ثانية فقط. وهذا أسرع بثلاث مرات من الرقم القياسي السابق الذي سجله روبوت آخر.
لم يكن وراء الرقم القياسي روبوت يتحرك بسرعة أكبر. فقد جمع فريق الطلاب بين نظام كاميرا عالي السرعة ولكن منخفض الدقة، ومكعب روبيك مصمم خصيصًا لزيادة المتانة، وتقنية حل خاصة شائعة بين محترفي حل مكعب روبيك بسرعة.
أهم العوامل المميزة مقارنة بالمنافسين.
بدأ التنافس على بناء روبوتات لحل مكعب روبيك في عام 2014، عندما تمكن روبوت مُجمّع من مجموعة ليغو مايندستورمز وباستخدام هاتف سامسونج جالاكسي إس 4 من حل مكعب روبيك في 3.253 ثانية فقط. وفي مايو 2024، حقق مهندسون في شركة ميتسوبيشي إلكتريك اليابانية رقماً قياسياً عالمياً بروبوت حل مكعب روبيك في 0.305 ثانية.
لتقليل زمن حل الروبوت لمكعب روبيك إلى أقل من نصف ثانية، استغنى الفريق عن استخدام قطع الليغو واستخدم بدلاً منها قطعًا مُحسّنة مثل المحركات الصناعية. ولكن لتحقيق زمن 0.103 ثانية، حسّن فريق جامعة بيردو سرعة "رؤية" الروبوت لحركة مكعب روبيك.
تستطيع برامج حل مكعب روبيك السريع معاينة المكعب قبل بدء المؤقت. ومع ذلك، سيأخذ المؤقت في الاعتبار أيضًا الوقت الذي يستغرقه الروبوت لتحديد موقع كل مربع ملون على أوجه المكعب.
استخدمت مجموعة الطلاب كاميرتين عاليتي السرعة للرؤية الآلية من شركة فلير، بدقة 720×540 بكسل فقط، وُضعتا في زاويتين متقابلتين من مكعب روبيك. ويمكن لكل كاميرا أن ترصد ثلاثة أوجه من المكعب في لقطة واحدة تستغرق 10 ميكروثانية فقط.
") |
تقنية التعرف على الألوان فائقة السرعة في الروبوت. الصورة: مقدمة من المؤلف. |
لا تزال الكاميرات التقليدية تحتاج إلى وقت لمعالجة البيانات من المستشعر وتحويلها إلى صورة رقمية. مع ذلك، يستخدم مكعب بوردوبيك، وهو الروبوت الذي ابتكره فريق الطلاب، نظامًا مخصصًا للتعرف على الصور يتجاوز تمامًا خطوة معالجة الصور هذه.
يركز هذا النظام على منطقة صغيرة جدًا (128×124 بكسل) ضمن إطار كل كاميرا، مما يقلل من كمية البيانات التي تحتاج إلى معالجة. تُرسل البيانات الأولية من المستشعرات مباشرةً إلى نظام كشف ألوان عالي السرعة، يستخدم قيم RGB من مناطق عينة أصغر لتحديد اللون بشكل أسرع من الطرق التقليدية وطرق الذكاء الاصطناعي.
على الرغم من أن هذه الطريقة أقل استقرارًا، إلا أنها تضمن تلبية المطلب الأساسي للمجموعة. يقول باتروهاي، وهو طالب في المجموعة: "حتى لو كانت الدقة 90% فقط، فهذا جيد بما فيه الكفاية. ما نحتاجه حقًا هو السرعة".
قم بتحسين النظام بأكمله.
يجادل باتروهاي بأن كل روبوت سابق حطم الرقم القياسي لم يُحسّن عادةً سوى ميزة بارزة واحدة. ركّز الروبوت الذي صمّمه فريق طلاب معهد ماساتشوستس للتكنولوجيا (2018) على استخدام معدات صناعية عالية الأداء. واختار فريق ميتسوبيشي إلكتريك محركات كهربائية متخصصة، مُحسّنة لتدوير كل وجه من أوجه مكعب روبيك.
في غضون ذلك، اختار فريق جامعة بيردو برمجيات جاهزة لتحسين النظام بأكمله، بدءًا من الكاميرا ومعالجة الصور وصولًا إلى الأجهزة وخوارزميات الحل. استخدموا خوارزمية Rob-Twophase التي طورها إلياس فرانتار، وهي خوارزمية لحل مكعب روبيك مصممة خصيصًا للروبوتات، مما سمح لهم بالاستفادة من قدرات خاصة مثل تدوير كلا وجهي مكعب روبيك في وقت واحد.
استخدمت المجموعة أيضًا تقنية تسمح لهم ببدء تدوير أحد جوانب مكعب روبيك قبل إكمال تدوير الجانب الآخر العمودي عليه. توفر هذه الطريقة وقتًا كبيرًا، لكنها تنطوي على خطر إتلاف مكعب روبيك أو حتى تحطيمه إذا كان التوقيت خاطئًا أو تم استخدام قوة زائدة. لذلك، كان على الطلاب تعديل مكعب روبيك بشكل أكبر ليتحمل القوة ويعمل بسلاسة مع هذه التقنية.
وفقًا لقواعد الرابطة العالمية لمكعب روبيك (WCA)، يُمكن للمشاركين تخصيص مكعب روبيك الخاص بهم، شريطة أن يظل قادرًا على الدوران والعمل كمكعب قياسي، مع وجود 9 مربعات ملونة على كل وجه، و6 أوجه بستة ألوان مختلفة. يُمكن للاعبين استخدام مواد أخرى غير البلاستيك، ولكن يجب أن تتمتع الأجزاء الملونة بنفس ملمس السطح.
") |
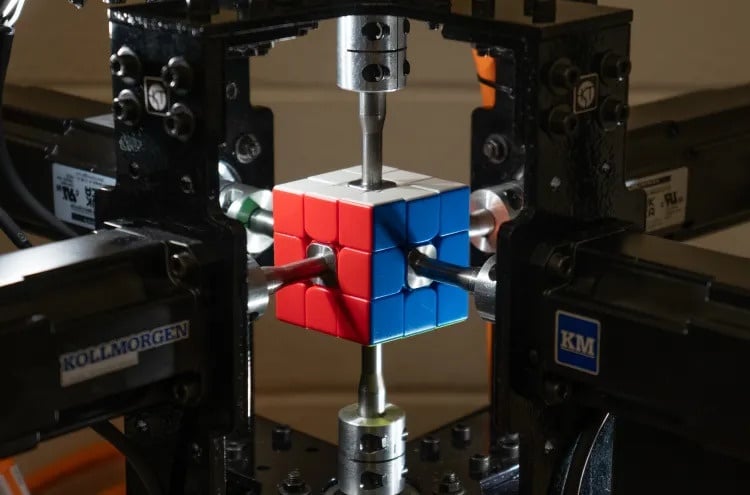
سيتم تركيب ستة محركات مماثلة على الجوانب المتبقية، مهمتها تدوير مكعب روبيك. الصورة: مقدمة من المؤلف. |
لزيادة المتانة، قام فريق جامعة بيردو بتطوير البنية الداخلية لمكعب روبيك باستخدام نسخة مطبوعة ثلاثية الأبعاد مصممة خصيصًا من راتنج نايلون SLS أكثر صلابة. وقد ساهم تحسين التشحيم والشد في تقليل الدوران الزائد وتحسين التحكم.
يستخدم مكعب بوردوبيك ستة محركات متصلة بأعمدة معدنية تقع في مركز كل وجه من أوجه مكعب روبيك. بعد تجربة طرق مختلفة، اختار الفريق استخدام نظام حركة شبه منحرف حتى يتمكن الروبوت من محاذاة كل وجه بدقة عند توقفه.
يعتقد باتروهاي أن بوردوبيك قادر على تحطيم رقمه القياسي لو كان مكعب روبيك أكثر متانة ومصنوعاً من مادة أخرى غير البلاستيك. وقال: "لو صُنع مكعب روبيك متخصص بالكامل من مركب ألياف الكربون، أعتقد أنه سيتحمل سرعات أعلى، مما سيسمح بتقليص الوقت اللازم لحله أكثر".
المصدر: https://znews.vn/ben-trong-robot-giai-rubik-nhanh-nhat-the-gioi-post1557575.html
![[صورة] رئيس الوزراء فام مينه تشينه يحضر مؤتمر تنفيذ مهام قطاع الصناعة والتجارة لعام 2026](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F19%2F1766159500458_ndo_br_shared31-jpg.webp&w=3840&q=75)



































































































تعليق (0)