
הרובוט ההיברידי הביולוגי של יפן , שגובהו 3 ס"מ בלבד, יכול לנוע ואף לשנות כיוון מתחת למים הודות להתכווצויות שרירים.
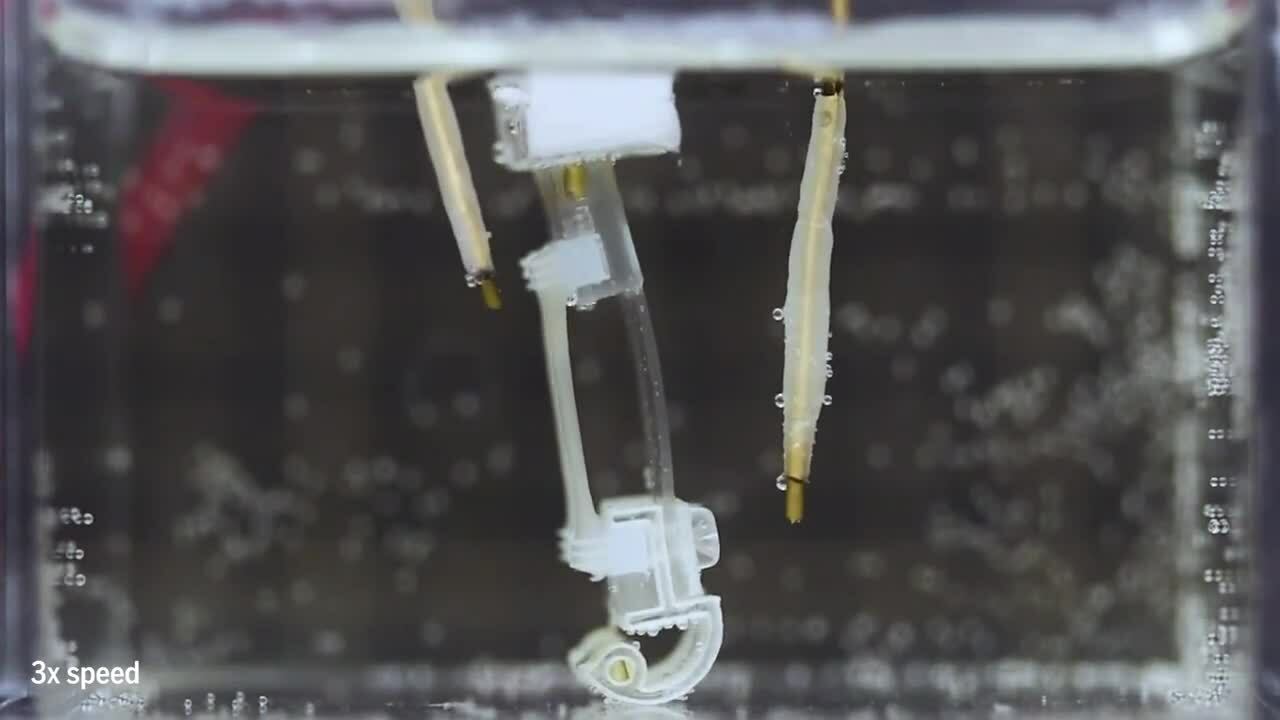
רובוט דו-רגלי הולך במים. וידאו : Science.org
מדענים יפנים יצרו רובוט קטן בעל שתי רגליים המשלב גם רקמת שריר וגם חומרים מלאכותיים, המסוגל ללכת ולשנות כיוון על ידי כיווץ שריריו, כך דיווח הניו סיינטיסט ב-26 בינואר. המחקר החדש פורסם בכתב העת Matter.
בעבר, רובוטים ביו-היברידיים מסוימים המסוגלים לזחול ולשחות נבנו עם שרירים שפותחו במעבדה. עם זאת, רובוט חדש זה הוא הרובוט הדו-רגלי הראשון המסוגל להסתובב ולבצע פניות חדות. הוא משיג זאת על ידי העברת חשמל לרגל אחת כדי לגרום לשריר להתכווץ, בעוד שהרגל השנייה נשארת נייחת. השריר פועל כביו-מפעיל - מכשיר הממיר אנרגיה חשמלית לכוח מכני.
הרובוט גובהו 3 ס"מ בלבד, כרגע אינו מסוגל לעמוד לבדו באוויר, ויש לו מצוף ספוג שעוזר לו להישאר זקוף במיכל מים. שריריו פותחו מתאי עכבר במעבדה.
"זהו רק מחקר בסיסי. עדיין לא הגענו לשלב שבו נוכל להשתמש ברובוט הזה בכל מקום. כדי לגרום לו לעבוד באוויר, אנחנו צריכים לפתור בעיות רבות הקשורות, אבל אנחנו מאמינים שזה אפשרי על ידי הגברת כוח השרירים שלו", אמר שוג'י טאקוצ'י, חבר בצוות המחקר ומומחה באוניברסיטת טוקיו.
הרובוט עדיין איטי מאוד בסטנדרטים אנושיים, ונע רק 5.4 מ"מ בדקה. לוקח לו גם יותר מדקה להסתובב 90 מעלות, בתנאי שהוא מקבל גירוי חשמלי כל 5 שניות. כדי שיוכל לנוע באוויר במקום במים, הרובוט זקוק גם למערכת אספקת חומרים מזינים כדי לתמוך ברקמת השריר שלו.
טאקוצ'י מקווה שצוות המחקר יוכל לגרום לרובוט לנוע מהר יותר על ידי אופטימיזציה של מודל הגירוי החשמלי ושיפור העיצוב. "הצעד הבא עם הרובוט הביו-היברידי הזה הוא לפתח גרסה עם מפרקים ורקמות שריר נוספות כדי שיוכל ללכת בצורה מתוחכמת יותר. בנוסף, עלינו לפתח שרירים עבים יותר כדי להגביר את הכוח", אמר.
"רובוטים ביולוגיים היברידיים הם כלים שימושיים לחקר רקמת שריר שעברה שינוי, וגם מסייעים במחקר כיצד לשלוט במפעילים ביומכניים. ככל שהכוח והשליטה ישתפרו באמצעות מחקר מסוג זה, היישומים הפוטנציאליים של מפעילים כאלה עבור רובוטים מורכבים יותר יגדלו", אמרה המומחית ויקטוריה וובסטר-ווד מאוניברסיטת קרנגי מלון.
ת'ו טאו (על פי ניו סיינטיסט )
[מודעה_2]
קישור למקור












































































































תגובה (0)