
 |
Egy diákcsoport által létrehozott Rubik-kocka kirakó gép világrekordot állított fel. Fotó: A csapat tájékoztatása szerint . |
Egy csoport Purdue Egyetemi diák nemrégiben új Guinness-világrekordot állított fel egy saját tervezésű robottal, amely mindössze 0,103 másodperc alatt képes kirakni egy Rubik-kockát. Ez háromszor gyorsabb, mint egy másik robot által korábban felállított rekord.
A rekord mögött nem egy gyorsabban mozgó robot állt. A diákcsapat egy nagy sebességű, de alacsony felbontású kamerarendszert, egy egyedi tervezésű Rubik-kockát a nagyobb tartósság érdekében, és egy speciális kirakási technikát kombinált, amely népszerű a gyors Rubik-kocka kirakók körében.
Főbb megkülönböztető tényezők a versenytársakhoz képest.
A Rubik-kockát kirakó robotok építéséért folytatott verseny 2014-ben kezdődött, amikor egy Lego Mindstorms készletből összerakott és egy Samsung Galaxy S4 telefonnal ellátott robot mindössze 3,253 másodperc alatt megoldotta a Rubik-kockát. 2024 májusában a japán Mitsubishi Electric mérnökei világrekordot állítottak fel egy robottal, amely 0,305 másodperc alatt oldotta meg a Rubik-kockát.
Hogy a robot Rubik-kocka kirakási idejét fél másodperc alá csökkentsék, a csapat felhagyott a Lego alkatrészek használatával, és ehelyett optimalizált alkatrészeket, például ipari motorokat használt. A 0,103 másodperces határ eléréséhez azonban a Purdue csapata finomította azt a sebességet, amellyel robotjuk „látta” a Rubik-kocka kirakásának menetét.
A Rubik-kocka kirakói megfigyelhetik a kockát az időzítő elindulása előtt. Az időzítő azonban figyelembe veszi azt az időt is, amely alatt a robot azonosítja az egyes színes négyzetek helyét a lapokon.
A diákcsoport két nagy sebességű, mindössze 720x540 pixeles felbontású Flir gépi látó kamerát használt, amelyeket a Rubik-kocka szemközti sarkaiban helyeztek el. Mindkét kamera egyetlen, mindössze 10 mikroszekundumos felvételen keresztül tudta megfigyelni a kocka három lapját.
") |
A robot rendkívül gyors színfelismerő technológiája. Fotó: A szerző tájékoztatása szerint. |
A hagyományos kameráknak továbbra is időre van szükségük az érzékelőből érkező adatok feldolgozásához és digitális képpé alakításához. A diákcsoport által létrehozott Purdubik's Cube robot azonban egy egyedi képfelismerő rendszert használ, amely teljesen megkerüli ezt a képfeldolgozási lépést.
Ez a rendszer a képkockán belül egy nagyon kis területre (128x124 pixel) fókuszál, amelyet minden kamera rögzít, csökkentve a feldolgozandó adatmennyiséget. A szenzoroktól származó nyers adatok közvetlenül egy nagy sebességű színérzékelő rendszerbe kerülnek, amely még kisebb mintavételi területek RGB-értékeit használja fel a színek gyorsabb meghatározásához, mint a hagyományos és a mesterséges intelligencia által alkalmazott módszerek.
Bár ez a módszer kevésbé stabil, biztosíthatja a csoport elsődleges követelményének teljesülését. „Még ha a pontosság csak 90%, az is elég jó. Amire igazán szükségünk van, az a sebesség” – osztotta meg Patrohay, a csoport egyik diákja.
Optimalizálja a teljes rendszert.
Patrohay szerint minden korábbi rekorddöntő robot jellemzően csak egyetlen kiemelkedő tulajdonságát fejlesztette tovább. Az MIT hallgatói csapatának robotja (2018) a nagy teljesítményű ipari hardverek használatára összpontosított. A Mitsubishi Electric csapata speciális villanymotorokat választott, amelyeket a Rubik-kocka minden egyes lapjának forgatására optimalizáltak.
Eközben a Purdue csapata könnyen elérhető szoftvereket választott a teljes rendszer optimalizálására, a kamerától és a képfeldolgozástól kezdve a hardveren át a megoldó algoritmusokig. Elias Frantar Rob-Twophase-át használták, egy kifejezetten robotokhoz tervezett Rubik-kocka megoldó algoritmust, amely lehetővé teszi számukra, hogy olyan speciális képességeket használjanak ki, mint például a Rubik-kocka mindkét oldalának egyidejű forgatása.
A csoport egy olyan technikát is alkalmazott, amely lehetővé teszi számukra, hogy a Rubik-kocka egyik oldalát elkezdjék forgatni, mielőtt a másik oldalt merőlegesen elforgatnák. Ez a módszer jelentős időt takarít meg, de fennáll a Rubik-kocka károsodásának vagy akár összetörésének veszélye, ha az időzítés rossz, vagy túl nagy erőt alkalmaznak. Ezért a diákoknak tovább kellett testre szabniuk a Rubik-kockát, hogy ellenálljon az erőnek, és simán működjön ezzel a technikával.
A Rubik-kocka Világszövetség (WCA) szabályai szerint a résztvevők testreszabhatják Rubik-kockájukat, amennyiben az továbbra is forgatható és egy hagyományos kockaként működik, minden oldalon 9 színes négyzettel és 6 oldallal, 6 különböző színűvel. A játékosok a műanyagon kívül más anyagokat is használhatnak, de a színes részeknek azonos felületi textúrájúaknak kell lenniük.
") |
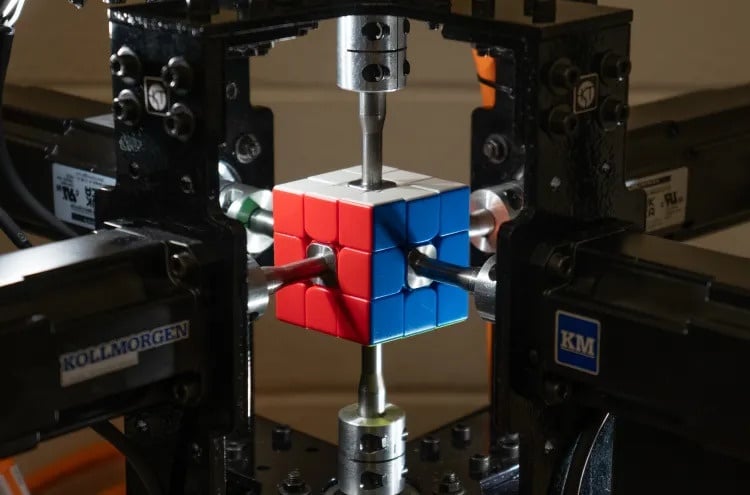
Hat ilyen motort fognak a fennmaradó oldalakhoz rögzíteni, amelyek feladata a Rubik-kocka forgatása lesz. Fotó: A szerző tájékoztatása szerint. |
A tartósság növelése érdekében a Purdue csapata egy egyedi, 3D nyomtatású, erősebb SLS nejlongyantát használó verzióval fejlesztette tovább a Rubik-kocka belső szerkezetét. A fokozott kenés és feszültség egyidejűleg segít csökkenteni a túlzott elfordulást és javítja a kontrollt.
A Purdubik-kocka hat motort használ, amelyek a Rubik-kocka minden lapjának közepén található fémtengelyekhez vannak rögzítve. Különböző módszerekkel való kísérletezés után a csapat egy trapéz mozgásrendszer mellett döntött, hogy a robot pontosan be tudja állítani az egyes lapokat megállásra.
Patrohay úgy véli, Purdubik megdönthetné saját rekordját, ha a Rubik-kocka tartósabb lenne, és nem műanyagból készülne. „Ha egy speciális Rubik-kockát teljes egészében szénszálas kompozitból készítenénk, szerintem nagyobb sebességet is kibírna. Ez lehetővé tenné az idő további lerövidítését” – mondta.
Forrás: https://znews.vn/ben-trong-robot-giai-rubik-nhanh-nhat-the-gioi-post1557575.html



![[Fotó] Pham Minh Chinh miniszterelnök részt vesz az ipari és kereskedelmi szektor 2026-os feladatainak végrehajtásáról szóló konferencián](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F19%2F1766159500458_ndo_br_shared31-jpg.webp&w=3840&q=75)


































































































Hozzászólás (0)