
 |
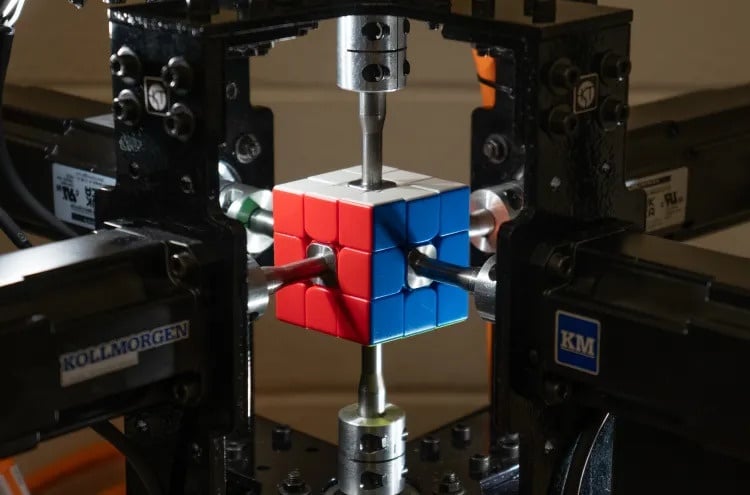
ម៉ាស៊ីនដោះស្រាយគូប Rubik ដែលបង្កើតឡើងដោយក្រុមសិស្សមួយក្រុម បានបង្កើតកំណត់ត្រា ពិភពលោក ។ រូបថត៖ ផ្តល់ដោយក្រុម ។ |
ថ្មីៗនេះ ក្រុមនិស្សិតសាកលវិទ្យាល័យ Purdue មួយក្រុមបានបំបែកកំណត់ត្រាពិភពលោក Guinness ថ្មីមួយជាមួយនឹងមនុស្សយន្តដែលពួកគេបានរចនាដោយខ្លួនឯង ដែលមានសមត្ថភាពដោះស្រាយគូប Rubik ក្នុងរយៈពេលត្រឹមតែ 0.103 វិនាទីប៉ុណ្ណោះ។ នេះលឿនជាងកំណត់ត្រាមុនដែលបង្កើតឡើងដោយមនុស្សយន្តមួយផ្សេងទៀតដល់ទៅបីដង។
នៅពីក្រោយកំណត់ត្រានេះមិនមែនជាមនុស្សយន្តដែលធ្វើចលនាលឿនជាងនេះទេ។ ក្រុមនិស្សិតបានរួមបញ្ចូលគ្នានូវប្រព័ន្ធកាមេរ៉ាល្បឿនលឿន ប៉ុន្តែមានគុណភាពបង្ហាញទាប គូប Rubik ដែលរចនាឡើងតាមតម្រូវការសម្រាប់ភាពធន់កាន់តែខ្លាំង និងបច្ចេកទេសដោះស្រាយពិសេសមួយដែលពេញនិយមក្នុងចំណោមអ្នកដោះស្រាយគូប Rubik ល្បឿនលឿន។
ភាពខុសគ្នាសំខាន់ៗបើប្រៀបធៀបទៅនឹងដៃគូប្រកួតប្រជែង។
ការប្រណាំងប្រជែងដើម្បីបង្កើតមនុស្សយន្តដោះស្រាយគូប Rubik បានចាប់ផ្តើមនៅឆ្នាំ ២០១៤ នៅពេលដែលមនុស្សយន្តមួយគ្រឿងដែលបានផ្គុំចេញពីឧបករណ៍ Lego Mindstorms និងប្រើប្រាស់ទូរស័ព្ទ Samsung Galaxy S4 បានដោះស្រាយគូប Rubik ក្នុងរយៈពេលត្រឹមតែ ៣,២៥៣ វិនាទីប៉ុណ្ណោះ។ នៅក្នុងខែឧសភា ឆ្នាំ ២០២៤ វិស្វករនៅក្រុមហ៊ុន Mitsubishi Electric ក្នុងប្រទេសជប៉ុន បានដណ្ដើមកំណត់ត្រាពិភពលោកជាមួយនឹងមនុស្សយន្តដោះស្រាយគូប Rubik ក្នុងរយៈពេល ០,៣០៥ វិនាទី។
ដើម្បីកាត់បន្ថយពេលវេលាដោះស្រាយគូប Rubik's Cube របស់មនុស្សយន្តមកត្រឹមតិចជាងកន្លះវិនាទី ក្រុមបានបោះបង់ការប្រើប្រាស់គ្រឿងបន្លាស់ Lego ហើយជំនួសមកវិញបានប្រើប្រាស់គ្រឿងបន្លាស់ដែលបានធ្វើឲ្យប្រសើរឡើងដូចជាម៉ូទ័រឧស្សាហកម្ម។ ប៉ុន្តែដើម្បីសម្រេចបានកំណត់ត្រា 0.103 វិនាទី ក្រុម Purdue បានកែលម្អល្បឿនដែលមនុស្សយន្តរបស់ពួកគេអាច "មើលឃើញ" ការរំកិលគូប Rubik's Cube។
អ្នកដោះស្រាយគូប Rubik's Cube ល្បឿនអាចសង្កេតមើលគូបមុនពេលកម្មវិធីកំណត់ម៉ោងចាប់ផ្តើម។ ទោះជាយ៉ាងណាក៏ដោយ កម្មវិធីកំណត់ម៉ោងក៏នឹងគិតគូរពីពេលវេលាដែលមនុស្សយន្តត្រូវការដើម្បីកំណត់ទីតាំងនៃការ៉េពណ៌នីមួយៗនៅលើផ្ទៃផងដែរ។
ក្រុមនិស្សិតបានប្រើប្រាស់កាមេរ៉ាចក្ខុវិស័យម៉ាស៊ីនល្បឿនលឿនចំនួនពីរពីក្រុមហ៊ុន Flir ដែលមានគុណភាពបង្ហាញត្រឹមតែ 720x540 ភីកសែល ដែលដាក់នៅជ្រុងទល់មុខគ្នានៃគូប Rubik's Cube។ កាមេរ៉ានីមួយៗអាចសង្កេតមើលមុខបីនៃគូបក្នុងពេលដំណាលគ្នាក្នុងការថតតែមួយដែលមានរយៈពេលត្រឹមតែ 10 មីក្រូវិនាទីប៉ុណ្ណោះ។
") |
បច្ចេកវិទ្យាសម្គាល់ពណ៌ដ៏លឿនបំផុតរបស់មនុស្សយន្តនេះ។ រូបថត៖ ផ្តល់ដោយអ្នកនិពន្ធ។ |
កាមេរ៉ាធម្មតានៅតែត្រូវការពេលវេលាដើម្បីដំណើរការទិន្នន័យពីឧបករណ៍ចាប់សញ្ញា ហើយបំប្លែងវាទៅជារូបភាពឌីជីថល។ ទោះជាយ៉ាងណាក៏ដោយ Purdubik's Cube ដែលជាមនុស្សយន្តដែលបង្កើតឡើងដោយក្រុមនិស្សិត ប្រើប្រាស់ប្រព័ន្ធសម្គាល់រូបភាពផ្ទាល់ខ្លួនដែលរំលងជំហានដំណើរការរូបភាពនេះទាំងស្រុង។
ប្រព័ន្ធនេះផ្តោតលើផ្ទៃតូចមួយ (128x124 ភីកសែល) នៅក្នុងស៊ុមដែលកាមេរ៉ានីមួយៗថតបាន ដែលកាត់បន្ថយបរិមាណទិន្នន័យដែលត្រូវដំណើរការ។ ទិន្នន័យឆៅពីឧបករណ៍ចាប់សញ្ញាត្រូវបានផ្ញើដោយផ្ទាល់ទៅប្រព័ន្ធរកឃើញពណ៌ល្បឿនលឿន ដែលប្រើតម្លៃ RGB ពីតំបន់គំរូតូចៗ ដើម្បីកំណត់ពណ៌លឿនជាងវិធីសាស្ត្រធម្មតា និង AI។
ទោះបីជាវិធីសាស្ត្រនេះមិនសូវមានស្ថេរភាពក៏ដោយ វាអាចធានាថាតម្រូវការចម្បងរបស់ក្រុមត្រូវបានបំពេញ។ លោក Patrohay ដែលជាសិស្សម្នាក់នៅក្នុងក្រុមបានចែករំលែកថា "ទោះបីជាភាពត្រឹមត្រូវមានត្រឹមតែ 90% ក៏ដោយ ក៏វានៅតែល្អគ្រប់គ្រាន់ដែរ។ អ្វីដែលយើងពិតជាត្រូវការគឺល្បឿន"។
ធ្វើឱ្យប្រព័ន្ធទាំងមូលប្រសើរឡើង។
លោក Patrohay អះអាងថា មនុស្សយន្តដែលបំបែកកំណត់ត្រានីមួយៗពីមុនជាធម្មតាបានធ្វើឱ្យប្រសើរឡើងនូវលក្ខណៈពិសេសលេចធ្លោតែមួយប៉ុណ្ណោះ។ មនុស្សយន្តដែលបង្កើតឡើងដោយក្រុមនិស្សិត MIT (ឆ្នាំ ២០១៨) ផ្តោតលើការប្រើប្រាស់ផ្នែករឹងឧស្សាហកម្មដែលមានដំណើរការខ្ពស់។ ក្រុម Mitsubishi Electric បានជ្រើសរើសម៉ូទ័រអគ្គិសនីឯកទេស ដែលត្រូវបានធ្វើឱ្យប្រសើរឡើងសម្រាប់ការបង្វិលមុខនីមួយៗនៃគូប Rubik។
ទន្ទឹមនឹងនេះ ក្រុម Purdue បានជ្រើសរើសយកកម្មវិធីដែលអាចរកបានយ៉ាងងាយស្រួល ដើម្បីធ្វើឱ្យប្រព័ន្ធទាំងមូលមានប្រសិទ្ធភាព ចាប់ពីកាមេរ៉ា និងដំណើរការរូបភាព រហូតដល់ផ្នែករឹង និងក្បួនដោះស្រាយដោះស្រាយ។ ពួកគេបានប្រើ Rob-Twophase របស់ Elias Frantar ដែលជាក្បួនដោះស្រាយដោះស្រាយគូប Rubik ដែលត្រូវបានរចនាឡើងជាពិសេសសម្រាប់មនុស្សយន្ត ដែលអនុញ្ញាតឱ្យពួកគេទាញយកអត្ថប្រយោជន៍ពីសមត្ថភាពពិសេសដូចជាការបង្វិលភាគីទាំងសងខាងនៃគូប Rubik ក្នុងពេលដំណាលគ្នា។
ក្រុមនេះក៏បានប្រើប្រាស់បច្ចេកទេសមួយដែលអនុញ្ញាតឱ្យពួកគេចាប់ផ្តើមបង្វិលជ្រុងម្ខាងនៃគូប Rubik មុនពេលបញ្ចប់ការបង្វិលជ្រុងម្ខាងទៀតដែលកាត់កែងទៅនឹងវា។ វិធីសាស្ត្រនេះជួយសន្សំសំចៃពេលវេលាយ៉ាងច្រើន ប៉ុន្តែវាប្រឈមនឹងការខូចខាត ឬសូម្បីតែបំបែកគូប Rubik ប្រសិនបើពេលវេលាមិនត្រឹមត្រូវ ឬប្រើកម្លាំងច្រើនពេក។ ដូច្នេះ សិស្សានុសិស្សត្រូវកែសម្រួលគូប Rubik បន្ថែមទៀតដើម្បីទប់ទល់នឹងកម្លាំង និងដំណើរការយ៉ាងរលូនជាមួយបច្ចេកទេសនេះ។
យោងតាមច្បាប់របស់សមាគមគូបរូប៊ីកពិភពលោក (WCA) អ្នកចូលរួមអាចប្ដូរគូបរូប៊ីករបស់ពួកគេតាមបំណង ដរាបណាវានៅតែអាចបង្វិល និងដំណើរការដូចគូបស្តង់ដារ ជាមួយនឹងការ៉េពណ៌ចំនួន 9 នៅលើមុខនីមួយៗ និងមុខចំនួន 6 ដែលមានពណ៌ខុសៗគ្នាចំនួន 6។ អ្នកលេងអាចប្រើសម្ភារៈផ្សេងក្រៅពីផ្លាស្ទិច ប៉ុន្តែផ្នែកពណ៌ត្រូវតែមានវាយនភាពផ្ទៃដូចគ្នា។
") |
ម៉ូទ័រចំនួនប្រាំមួយដូចនេះនឹងត្រូវបានភ្ជាប់ទៅនឹងជ្រុងដែលនៅសល់ ដោយមានភារកិច្ចបង្វិលគូប Rubik។ រូបថត៖ ផ្តល់ដោយអ្នកនិពន្ធ។ |
ដើម្បីបង្កើនភាពធន់ ក្រុម Purdue បានធ្វើឱ្យប្រសើរឡើងនូវរចនាសម្ព័ន្ធខាងក្នុងរបស់ Rubik's Cube ជាមួយនឹងកំណែបោះពុម្ព 3D ផ្ទាល់ខ្លួនដោយប្រើជ័រនីឡុង SLS ដែលរឹងមាំជាង។ ការបង្កើនប្រេងរំអិល និងភាពតានតឹងក្នុងពេលដំណាលគ្នាជួយកាត់បន្ថយការបង្វិលហួសកម្រិត និងបង្កើនការគ្រប់គ្រង។
គូប Purdubik ប្រើម៉ូទ័រចំនួនប្រាំមួយដែលភ្ជាប់ទៅនឹងអ័ក្សដែកដែលមានទីតាំងនៅចំកណ្តាលនៃមុខនីមួយៗនៃគូប Rubik។ បន្ទាប់ពីពិសោធន៍ជាមួយវិធីសាស្ត្រផ្សេងៗ ក្រុមបានជ្រើសរើសប្រើប្រព័ន្ធចលនារាងត្រីកោណ ដើម្បីឱ្យមនុស្សយន្តអាចតម្រឹមមុខនីមួយៗបានយ៉ាងច្បាស់លាស់នៅពេលដែលវាឈប់។
លោក Patrohay ជឿជាក់ថា លោក Purdubik អាចបំបែកកំណត់ត្រាផ្ទាល់ខ្លួនរបស់គាត់បាន ប្រសិនបើគូប Rubik មានភាពធន់ជាង និងផលិតពីវត្ថុធាតុដើមផ្សេងក្រៅពីផ្លាស្ទិច។ លោកបានមានប្រសាសន៍ថា “ប្រសិនបើអ្នកផលិតគូប Rubik ឯកទេសទាំងស្រុងពីសមាសធាតុសរសៃកាបូន ខ្ញុំគិតថាវានឹងទប់ទល់នឹងល្បឿនលឿនជាង។ នោះនឹងអនុញ្ញាតឱ្យអ្នកកាត់បន្ថយពេលវេលាបន្ថែមទៀត”។
ប្រភព៖ https://znews.vn/ben-trong-robot-giai-rubik-nhanh-nhat-the-gioi-post1557575.html
![[រូបភាព] ស្មារតីប្រយុទ្ធដ៏រឹងមាំរបស់បាល់ទាត់នារីវៀតណាម](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F17%2F1765990260956_ndo_br_4224760955870434771-copy-jpg.webp&w=3840&q=75)
![[រូបភាព] រូបភាពលេចធ្លាយមុនពិធីជប់លៀងពានរង្វាន់សកម្មភាពសហគមន៍ឆ្នាំ ២០២៥។](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765882828720_ndo_br_thiet-ke-chua-co-ten-45-png.webp&w=3840&q=75)
![[ផ្សាយផ្ទាល់] ពិធីជប់លៀងពានរង្វាន់សកម្មភាពសហគមន៍ឆ្នាំ ២០២៥](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765899631650_ndo_tr_z7334013144784-9f9fe10a6d63584c85aff40f2957c250-jpg.webp&w=3840&q=75)

![[រូបថត] នាយករដ្ឋមន្ត្រី ផាម មិញឈីញ ជួបពិភាក្សាជាមួយរដ្ឋមន្ត្រីក្រសួងអប់រំ និងកីឡាឡាវ ថងសាលីត ម៉ាងណមេក](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765876834721_dsc-7519-jpg.webp&w=3840&q=75)
![[រូបថត] នាយករដ្ឋមន្ត្រី ផាម មិញឈីញ ជួបជាមួយអភិបាលខេត្ត Tochigi (ជប៉ុន)](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765892133176_dsc-8082-6425-jpg.webp&w=3840&q=75)

































































![[ផ្សាយផ្ទាល់] ពិធីបិទ និងប្រគល់រង្វាន់សម្រាប់ការប្រកួតបង្កើតវីដេអូ/វីដេអូឃ្លីប “ទេសចរណ៍វៀតណាមដ៏គួរឱ្យចាប់អារម្មណ៍” ឆ្នាំ២០២៥](https://vphoto.vietnam.vn/thumb/402x226/vietnam/resource/IMAGE/2025/12/17/1765974650260_z7273498850699-00d2fd6b0972cb39494cfa2559bf85ac-1765959338756946072104-627-0-1338-1138-crop-1765959347256801551121.jpeg)























Kommentar (0)