
서피스 아바타(Surface Avatar) 프로젝트는 2020년에 시작되었으며, 독일 우주국(DSA)이 유럽 우주국(ESA)과 협력하여 진행하고 있습니다. 이 프로젝트의 목표는 우주 비행사가 우주 환경에서 여러 대의 로봇을 독립적으로 동시에 정밀하게 제어하거나, 반자율 또는 완전 자율적으로 운용할 수 있도록 하는 기술을 개발하는 것입니다. 인류가 다시 달 표면을 탐사 하고 화성 탐사를 시작할 때, 이러한 로봇 시스템이 탐사 활동을 지원하는 데 활용될 수 있기를 기대합니다.
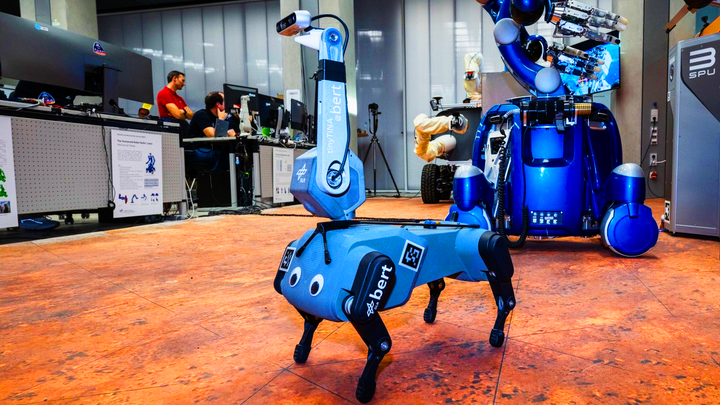
개처럼 생긴 로봇 버트가 우주에 있는 우주비행사로부터 제어 지원을 받고 있다. (사진: ESA/Andreas Mogensen/X)
따라서 최근 유럽우주국(ESA) 소속 국제우주정거장(ISS) 우주비행사 마커스 반트는 네 발 달린 개 모양 로봇 '버트'를 우주에서 처음으로 조종했습니다. 마커스 반트는 우주 임무 중 시간 지연이 로봇 제어에 미치는 영향을 알아보기 위해 이 실험을 진행했습니다.
시험 기간 동안 반트는 국제 우주 정거장(ISS)의 콜럼버스 모듈에 탑승하여 독일 우주국 오버파펜호펜 시설의 화성 연구소에 있는 로봇 베르트를 조종했습니다. 일련의 시험에서 반트는 세 가지 다른 로봇을 조종할 수 있었으며, 그중 첫 번째로 베르트를 조종했습니다.
완트는 잠시 베르트를 조종한 후, 로봇이 시뮬레이션 환경에서 자율적으로 탐색하도록 했으며, 동시에 독일 우주국(DAXA)의 바퀴 달린 휴머노이드 서비스 로봇 롤린 저스틴과 유럽 우주국(ESA)의 인터랙트 로버도 조종해 보았다.

우주비행사 마커스 완트가 네 발 달린 개처럼 생긴 로봇 '버트'를 조종하는 시험에 성공했다. (사진: ESA/Andreas Mogensen/X)
여러 대의 로봇이 참여한 이 실험은 2시간 30분 동안 진행되었으며 성공적으로 완료되었습니다. 독일 우주국(DSA)의 프로젝트 책임자는 "베르트 로봇이 바퀴 대신 다리로 움직일 수 있게 되면 화성이나 다른 외계 행성 에서 언덕을 오르거나 동굴을 더 쉽게 기어들어갈 수 있을 것"이라고 밝혔습니다.
독일 우주국 관계자는 지금까지 우주비행사가 우주에서 원격으로 조종할 수 있는 로봇은 바퀴 달린 로봇뿐이었다고 언급했습니다. 하지만 베르트는 여러 가지 보행 방식을 익혔고, 유연한 다리 움직임 덕분에 동굴을 포함한 험준한 지형까지 탐험할 수 있습니다.
후인 둥 (출처: Space/Europeanspaceflight)
[광고_2]
원천











































































































댓글 (0)