

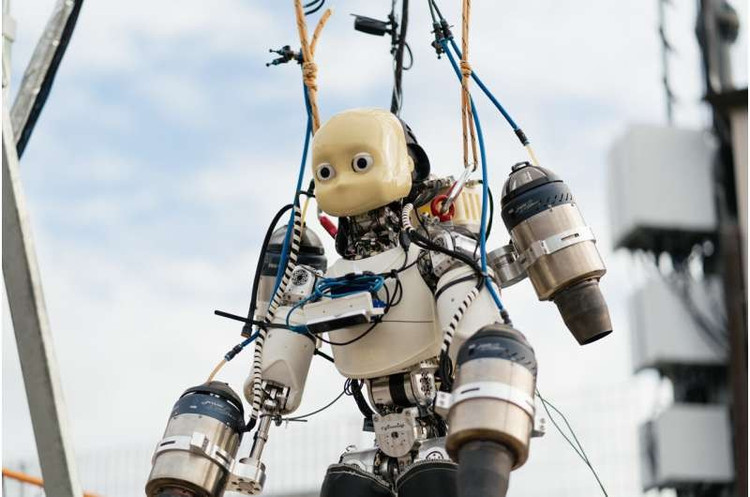
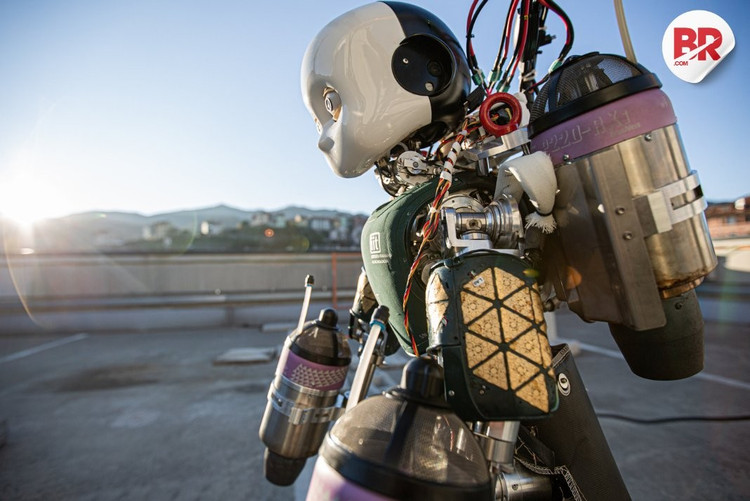
これは、ジェットタービンを使用して飛行できる世界初のヒューマノイドロボットである iRonCub3 によるイタリア工科大学 (IIT) の最新の成果です。
この製品は、特に高度な技術のサポートがますます必要になる救助および災害対応任務の分野において、多地形移動ロボットの研究における転換点となります。

iRonCub3は、腕部に2基、背中に2基、計4基のジェットエンジンを搭載し、1,000ニュートン以上の推力を発揮します。これは、70kgのロボット本体を地面から持ち上げるのに十分な推力です。チタン製の背骨と耐熱シェルは、800℃にも達する高温の排気ガスからロボットを保護し、動作中の安全性を確保します。
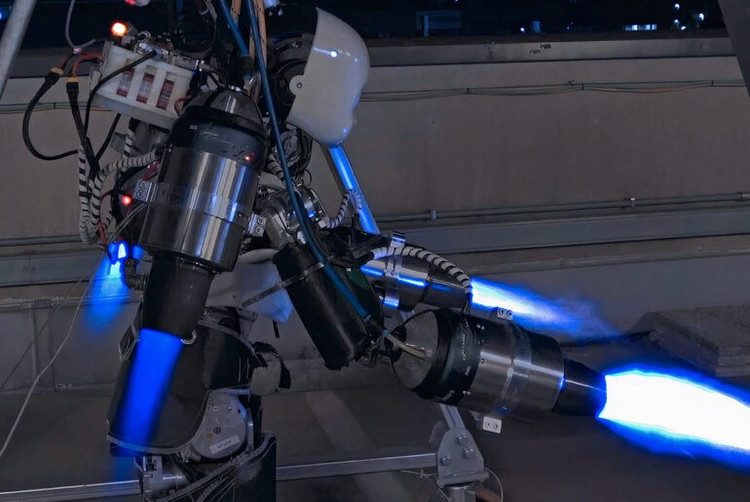
対称的で安定したドローンとは異なり、ロボットは柔軟な手足を持つヒューマノイド形状をしており、空気力学的変動と重心の絶え間ない変化を引き起こします。
この課題に対処するため、IIT のチームはミラノ工科大学およびスタンフォード大学と連携し、シミュレーションと現実世界のデータからトレーニングされたニューラル ネットワークを使用した AI 統合飛行制御システムを開発しました。
そのおかげで、iRonCub3 は飛行姿勢を調整し、乱気流に対処し、離陸時にジェットを順次発射することができます。
このロボットの開発においても「コデザイン」手法が採用され、機体形状とエンジン搭載位置を最適化し、最高の飛行性能を実現しました。一連のシミュレーションテスト、熱制御、推力センサー、離着陸アルゴリズムを綿密に改良しました。
IIT の機械・人工知能研究所 (AMI ラボ) 所長のダニエル・プッチ氏によると、このロボットの設計は、より過酷で予測不可能な環境での能力を拡張することを目的としているという。

iRonCub は、災害地域での救助活動、危険な環境の調査、複雑な構造を持つ閉鎖空間での自律航行などに応用できます。
近い将来、iRonCub3 はジェノバ空港で屋外テストを継続し、飛行ロボット技術を現実世界に統合するためのさらなるステップに備えることが期待されています。
出典: https://khoahocdoisong.vn/robot-tien-hoa-co-the-bay-ma-khong-can-con-nguoi-post1550041.html

![[写真] ファム・ミン・チン首相、嵐10号の影響克服に向けた会議を主宰](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/10/3/544f420dcc844463898fcbef46247d16)
![[写真]ビンミン小学校の生徒たちは満月祭を楽しみ、子ども時代の喜びを受け継いでいる](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/10/3/8cf8abef22fe4471be400a818912cb85)
![[インフォグラフィック] 3ヶ月間の「国の再編」後の注目すべき数字](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/10/4/ce8bb72c722348e09e942d04f0dd9729)























































![[インフォグラフィック] 3ヶ月間の「国の再編」後の注目すべき数字](https://vphoto.vietnam.vn/thumb/402x226/vietnam/resource/IMAGE/2025/10/4/ce8bb72c722348e09e942d04f0dd9729)
































コメント (0)