
높이가 3cm에 불과한 일본의 생체 결합 로봇은 근육 수축 덕분에 물속에서 움직이고 방향까지 바꿀 수 있습니다.
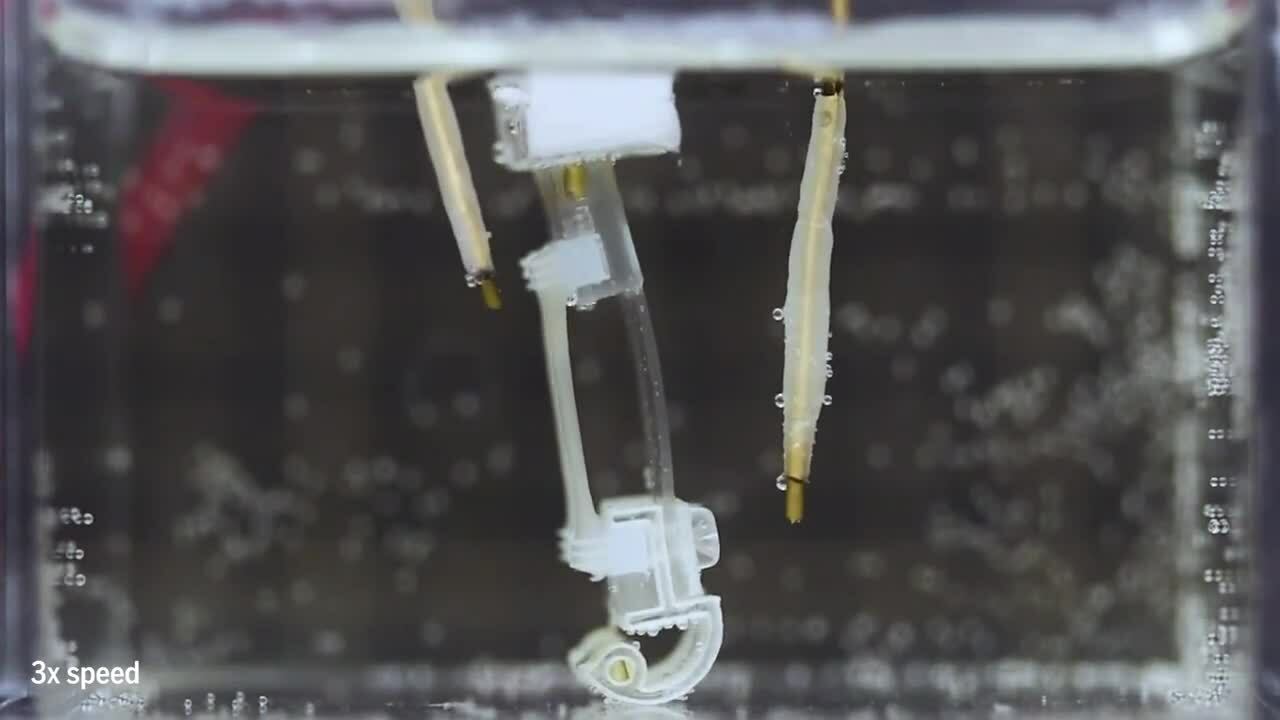
두 발로 걷는 로봇이 물속을 걷는다. (영상 출처 : Science.org)
일본 과학자들이 근육 조직과 인공 소재를 결합하여 걷고 근육 수축으로 방향을 바꿀 수 있는 소형 이족 보행 로봇을 개발했다고 뉴 사이언티스트지가 1월 26일 보도했다. 이번 연구는 학술지 '매터(Matter)'에 게재되었다.
이전에도 실험실에서 개발한 근육을 이용해 기어 다니거나 헤엄칠 수 있는 생체 하이브리드 로봇들이 제작된 바 있다. 그러나 이번에 새로 개발된 로봇은 두 발로 서서 회전하고 급회전까지 할 수 있는 최초의 로봇이다. 이 로봇은 한쪽 다리에 전기를 공급하여 근육을 수축시키는 동시에 다른 쪽 다리는 고정시키는 방식으로 이러한 동작을 구현한다. 이 근육은 전기 에너지를 기계적 힘으로 변환하는 생체 액추에이터 역할을 한다.
이 로봇은 높이가 3cm에 불과하며, 현재로서는 공중에 스스로 서 있을 수 없어 물탱크에서 균형을 잡을 수 있도록 폼 소재의 부력을 사용하고 있습니다. 로봇의 근육은 실험실에서 쥐 세포를 이용하여 개발되었습니다.
"이것은 기초 연구일 뿐입니다. 아직 이 로봇을 어디에서든 사용할 수 있는 단계에는 이르지 못했습니다. 공중에서 작동시키려면 해결해야 할 여러 가지 관련 문제가 있지만, 근력을 강화하면 가능할 것으로 생각합니다."라고 연구팀의 일원이자 도쿄대학교 전문가인 타케우치 쇼지 교수는 말했다.
이 로봇은 인간의 기준으로 보면 여전히 매우 느려서 분당 5.4mm밖에 움직이지 못합니다. 또한 5초마다 전기 자극을 받는다고 가정하더라도 90도 회전하는 데 1분 이상이 걸립니다. 물속이 아닌 공중에서 움직이려면 근육 조직에 영양을 공급하는 시스템도 필요합니다.
타케우치 교수는 연구팀이 전기 자극 모델을 최적화하고 설계를 개선하여 로봇의 속도를 높일 수 있기를 기대한다고 밝혔습니다. 그는 "이 생체 하이브리드 로봇의 다음 단계는 관절과 근육 조직을 추가하여 더욱 정교한 보행이 가능한 버전을 개발하는 것입니다. 또한, 근력을 강화하기 위해 더 두꺼운 근육을 개발해야 합니다."라고 말했습니다.
"생체 하이브리드 로봇은 변형된 근육 조직을 연구하는 데 유용한 도구이며, 생체역학적 액추에이터를 제어하는 방법을 연구하는 데에도 도움이 됩니다. 이러한 연구를 통해 힘과 제어 능력이 향상됨에 따라, 더욱 복잡한 로봇에 이러한 액추에이터를 적용할 수 있는 잠재력이 커질 것입니다."라고 카네기멜론 대학교의 빅토리아 웹스터-우드 전문가는 논평했습니다.
투 타오 ( 뉴 사이언티스트 에 따르면)
[광고_2]
출처 링크













































































































댓글 (0)