
Robotul hibrid biologic japonez , cu o înălțime de doar 3 cm, se poate mișca și chiar își poate schimba direcția sub apă datorită contracțiilor musculare.
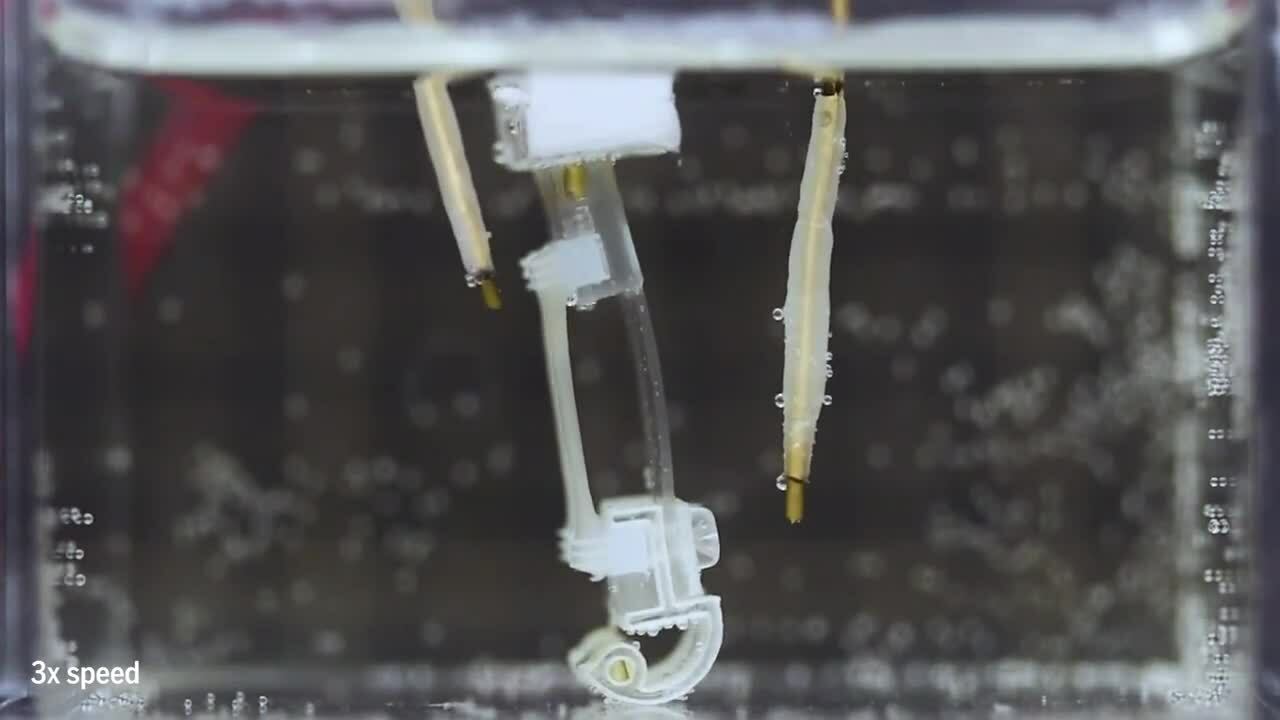
Robot biped merge în apă. Video : Science.org
Oamenii de știință japonezi au creat un robot biped de dimensiuni reduse, care încorporează atât țesut muscular, cât și materiale artificiale, capabil să meargă și să își schimbe direcția prin contracția mușchilor, a relatat New Scientist pe 26 ianuarie. Noua cercetare a fost publicată în revista Matter.
Anterior, unii roboți bio-hibrizi capabili să se târăască și să înoate au fost construiți cu mușchi dezvoltați în laborator. Cu toate acestea, acest nou robot este primul robot biped capabil să se rotească și să facă viraje bruște. Realizează acest lucru prin transmiterea de electricitate către un picior pentru a provoca contracția mușchiului, în timp ce celălalt picior rămâne staționar. Mușchiul acționează ca un bio-actuator - un dispozitiv care transformă energia electrică în forță mecanică.
Robotul are doar 3 cm înălțime, în prezent incapabil să stea singur în aer și are o plutitoare din spumă care îl ajută să rămână în poziție verticală într-un rezervor cu apă. Mușchii săi au fost dezvoltați din celule de șoarece într-un laborator.
„Aceasta este doar cercetare de bază. Nu am ajuns încă în stadiul în care putem folosi acest robot oriunde. Pentru a-l face să funcționeze în aer, trebuie să rezolvăm multe probleme conexe, dar credem că este posibil prin creșterea forței sale musculare”, a declarat Shoji Takeuchi, membru al echipei de cercetare și expert la Universitatea din Tokyo.
Robotul este încă foarte lent după standardele umane, mișcându-se cu doar 5,4 mm pe minut. De asemenea, are nevoie de peste un minut pentru a se roti cu 90 de grade, cu condiția să primească stimulare electrică la fiecare 5 secunde. Pentru a se putea mișca în aer în loc de apă, robotul are nevoie și de un sistem de alimentare cu nutrienți pentru a-și susține țesutul muscular.
Takeuchi speră că echipa de cercetare poate face robotul să se miște mai rapid prin optimizarea modelului de stimulare electrică și îmbunătățirea designului. „Următorul pas cu acest robot bio-hibrid este dezvoltarea unei versiuni cu articulații și țesut muscular suplimentar, astfel încât să poată merge într-un mod mai sofisticat. În plus, trebuie să dezvoltăm mușchi mai groși pentru a crește forța”, a spus el.
„Roboții hibrizi biologici sunt instrumente utile pentru studierea țesutului muscular modificat și ajută, de asemenea, la cercetarea modului de control al actuatoarelor biomecanice. Pe măsură ce forța și controlul sunt îmbunătățite prin acest tip de cercetare, aplicațiile potențiale ale unor astfel de actuatoare pentru roboți mai complecși vor crește”, a comentat experta Victoria Webster-Wood de la Universitatea Carnegie Mellon.
Thu Thao (conform New Scientist )
Legătură sursă




![[Foto] Prim-ministrul Pham Minh Chinh participă la Conferința privind implementarea sarcinilor pentru 2026 ale sectorului industriei și comerțului](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F19%2F1766159500458_ndo_br_shared31-jpg.webp&w=3840&q=75)










































































































Comentariu (0)