
 |
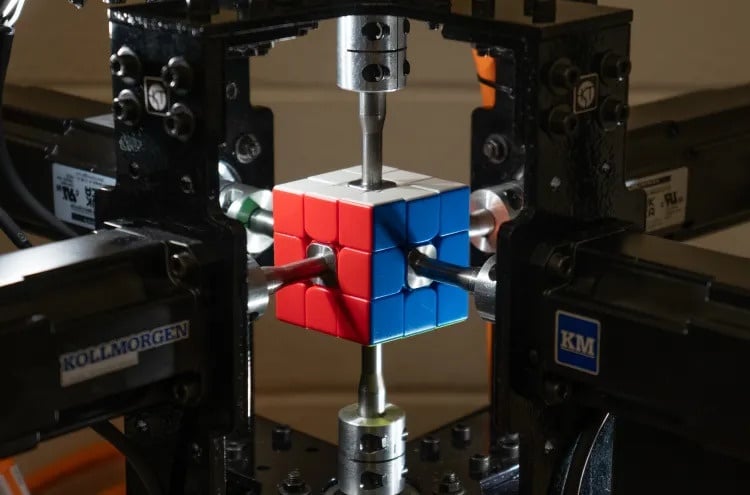
طالب علموں کے ایک گروپ کی جانب سے بنائی گئی روبک کیوب حل کرنے والی مشین نے عالمی ریکارڈ قائم کر دیا ہے۔ تصویر: ٹیم کے ذریعہ فراہم کردہ ۔ |
پرڈیو یونیورسٹی کے طالب علموں کے ایک گروپ نے حال ہی میں ایک روبوٹ کے ساتھ ایک نیا گنیز ورلڈ ریکارڈ قائم کیا ہے جو انہوں نے خود ڈیزائن کیا تھا، جو صرف 0.103 سیکنڈ میں روبک کیوب کو حل کرنے کی صلاحیت رکھتا ہے۔ یہ ایک اور روبوٹ کے قائم کردہ پچھلے ریکارڈ سے تین گنا تیز ہے۔
ریکارڈ کے پیچھے کوئی روبوٹ نہیں تھا جو تیزی سے آگے بڑھے۔ طلباء کی ٹیم نے تیز رفتار لیکن کم ریزولیوشن والے کیمرہ سسٹم، پائیداری میں اضافے کے لیے اپنی مرضی کے مطابق ڈیزائن کردہ Rubik's Cube، اور رفتار Rubik's Cube حل کرنے والوں میں مقبول حل کرنے کی ایک خاص تکنیک کو ملایا۔
حریفوں کے مقابلے میں کلیدی تفریق کرنے والے۔
Rubik's Cube حل کرنے والے روبوٹس بنانے کی دوڑ 2014 میں شروع ہوئی، جب ایک روبوٹ نے Lego Mindstorms کٹ سے اسمبل کیا اور Samsung Galaxy S4 فون کا استعمال کرتے ہوئے Rubik's Cube کو صرف 3.253 سیکنڈز میں حل کیا۔ مئی 2024 میں، جاپان میں مٹسوبشی الیکٹرک کے انجینئرز نے روبک کیوب کو 0.305 سیکنڈ میں حل کرکے عالمی ریکارڈ کا دعویٰ کیا۔
روبوٹ کے Rubik's Cube حل کرنے کے وقت کو آدھے سیکنڈ سے کم کرنے کے لیے، ٹیم نے Lego اجزاء کا استعمال ترک کر دیا اور اس کے بجائے صنعتی موٹرز جیسے بہتر حصوں کا استعمال کیا۔ لیکن 0.103 سیکنڈ کے نشان کو حاصل کرنے کے لیے، پرڈیو ٹیم نے اس رفتار کو بہتر بنایا جس سے ان کا روبوٹ روبک کیوب کی جھڑپ کو "دیکھ" سکتا تھا۔
سپیڈ روبک کیوب سولورز ٹائمر شروع ہونے سے پہلے کیوب کا مشاہدہ کر سکتے ہیں۔ تاہم، ٹائمر اس وقت کو بھی اہمیت دے گا جو روبوٹ کو چہروں پر ہر رنگین مربع کی جگہ کی نشاندہی کرنے میں لگتا ہے۔
طلباء کے گروپ نے فلر سے دو تیز رفتار مشین ویژن کیمرے استعمال کیے، جن کی ریزولوشن صرف 720x540 پکسلز تھی، جو روبک کیوب کے مخالف کونوں پر رکھے گئے تھے۔ ہر کیمرہ بیک وقت کیوب کے تین چہروں کو ایک ہی شاٹ میں صرف 10 مائیکرو سیکنڈ تک دیکھ سکتا ہے۔
") |
روبوٹ کی انتہائی تیز رنگ پہچاننے والی ٹیکنالوجی۔ تصویر: مصنف کے ذریعہ فراہم کردہ۔ |
روایتی کیمروں کو سینسر سے ڈیٹا پر کارروائی کرنے اور اسے ڈیجیٹل امیج میں تبدیل کرنے کے لیے اب بھی وقت درکار ہوتا ہے۔ تاہم، پرڈوبک کیوب، طالب علموں کے گروپ کی طرف سے تخلیق کردہ روبوٹ، ایک حسب ضرورت تصویر کی شناخت کا نظام استعمال کرتا ہے جو تصویری کارروائی کے اس مرحلے کو مکمل طور پر نظرانداز کرتا ہے۔
یہ سسٹم فریم کے اندر ایک بہت ہی چھوٹے علاقے (128x124 پکسلز) پر فوکس کرتا ہے جو ہر کیمرہ ریکارڈ کرتا ہے، جس سے ڈیٹا کی مقدار کو کم کر دیتا ہے جس پر کارروائی کی ضرورت ہوتی ہے۔ سینسرز سے خام ڈیٹا کو براہ راست تیز رفتار رنگوں کا پتہ لگانے کے نظام کو بھیجا جاتا ہے، جو روایتی اور AI دونوں طریقوں سے زیادہ تیزی سے رنگ کا تعین کرنے کے لیے اس سے بھی چھوٹے نمونے والے علاقوں سے RGB ویلیوز کا استعمال کرتا ہے۔
اگرچہ یہ طریقہ کم مستحکم ہے، لیکن یہ یقینی بنا سکتا ہے کہ گروپ کی بنیادی ضرورت پوری ہو۔ "اگرچہ درستگی صرف 90 فیصد ہے، تب بھی یہ کافی اچھا ہے۔ ہمیں واقعی رفتار کی ضرورت ہے،" گروپ کے ایک طالب علم پیٹروہائے نے شیئر کیا۔
پورے نظام کو بہتر بنائیں۔
پیٹروہائے کا استدلال ہے کہ ہر پچھلے ریکارڈ توڑنے والے روبوٹ نے عام طور پر صرف ایک نمایاں خصوصیت کو بہتر بنایا ہے۔ MIT طلباء کی ٹیم (2018) کے روبوٹ نے اعلیٰ کارکردگی والے صنعتی ہارڈویئر کے استعمال پر توجہ مرکوز کی۔ مٹسوبشی الیکٹرک ٹیم نے خصوصی الیکٹرک موٹرز کا انتخاب کیا، جو روبِک کیوب کے ہر چہرے کو گھمانے کے لیے موزوں ہیں۔
دریں اثنا، پرڈیو ٹیم نے کیمرے اور امیج پروسیسنگ سے لے کر ہارڈ ویئر اور الگورتھم کو حل کرنے تک پورے سسٹم کو بہتر بنانے کے لیے آسانی سے دستیاب سافٹ ویئر کا انتخاب کیا۔ انہوں نے Elias Frantar's Rob-Twophase کا استعمال کیا، ایک Rubik's Cube حل کرنے والا الگورتھم جو خاص طور پر روبوٹس کے لیے ڈیزائن کیا گیا ہے، جس سے وہ خصوصی صلاحیتوں کا فائدہ اٹھا سکتے ہیں جیسے کہ Rubik's Cube کے دونوں اطراف کو بیک وقت گھومنا۔
اس گروپ نے ایک ایسی تکنیک کا بھی استعمال کیا جس کی مدد سے وہ روبک کیوب کے ایک طرف کو گھومنا شروع کر سکتے ہیں اس سے پہلے کہ اس کے کھڑے دوسرے رخ کی گردش کو مکمل کریں۔ یہ طریقہ کافی وقت بچاتا ہے، لیکن اگر وقت غلط ہے یا بہت زیادہ طاقت کا استعمال کیا جاتا ہے تو اس سے Rubik's Cube کو نقصان پہنچنے یا یہاں تک کہ بکھرنے کا خطرہ ہے۔ لہذا، طلباء کو قوت برداشت کرنے اور اس تکنیک کے ساتھ آسانی سے چلانے کے لیے روبک کیوب کو مزید اپنی مرضی کے مطابق بنانا پڑا۔
ورلڈ روبکس کیوب ایسوسی ایشن (WCA) کے قوانین کے مطابق، شرکاء اپنے Rubik's Cube کو اپنی مرضی کے مطابق بنا سکتے ہیں، جب تک کہ یہ ایک معیاری مکعب کی طرح گھوم سکتا ہے اور کام کر سکتا ہے، ہر چہرے پر 9 رنگین چوکور ہیں، اور 6 چہرے 6 مختلف رنگوں کے ساتھ ہیں۔ کھلاڑی پلاسٹک کے علاوہ دیگر مواد استعمال کر سکتے ہیں، لیکن رنگین حصوں کی سطح کی ساخت ایک جیسی ہونی چاہیے۔
") |
اس طرح کی چھ موٹریں بقیہ اطراف سے منسلک ہوں گی، جنہیں روبک کیوب کو گھمانے کا کام سونپا گیا ہے۔ تصویر: مصنف کے ذریعہ فراہم کردہ۔ |
استحکام کو بڑھانے کے لیے، پرڈیو ٹیم نے ایک سخت SLS نایلان رال کا استعمال کرتے ہوئے اپنی مرضی کے 3D پرنٹ شدہ ورژن کے ساتھ Rubik's Cube کے اندرونی ڈھانچے کو اپ گریڈ کیا۔ بڑھتی ہوئی چکنا اور تناؤ بیک وقت زیادہ گردش کو کم کرنے اور کنٹرول کو بہتر بنانے میں مدد کرتا ہے۔
Purdubik's Cube میں Rubik's Cube کے ہر چہرے کے بیچ میں واقع دھاتی شافٹ سے منسلک چھ موٹریں استعمال ہوتی ہیں۔ مختلف طریقوں کے ساتھ تجربہ کرنے کے بعد، ٹیم نے ٹریپیزائڈل موومنٹ سسٹم کا استعمال کرنے کا انتخاب کیا تاکہ روبوٹ کے رکنے پر ہر چہرے کو ٹھیک ٹھیک سیدھ میں لے سکے۔
Patrohay کا خیال ہے کہ اگر Rubik's Cube زیادہ پائیدار اور پلاسٹک کے علاوہ کسی اور مواد سے بنائے گئے ہوں تو پرڈوبک اپنا ہی ریکارڈ توڑ سکتا ہے۔ "اگر آپ نے مکمل طور پر کاربن فائبر کے مرکب سے ایک خصوصی Rubik's Cube بنایا ہے، تو میرے خیال میں یہ زیادہ رفتار کو برداشت کرے گا۔ اس سے آپ کو مزید وقت کم کرنے کا موقع ملے گا،" انہوں نے کہا۔
ماخذ: https://znews.vn/ben-trong-robot-giai-rubik-nhanh-nhat-the-gioi-post1557575.html

![[تصویر] 2025 کمیونٹی ایکشن ایوارڈز گالا سے پہلے لیک ہونے والی تصاویر۔](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765882828720_ndo_br_thiet-ke-chua-co-ten-45-png.webp&w=3840&q=75)
![[تصویر] وزیر اعظم فام من چن نے صوبہ توچیگی (جاپان) کے گورنر کا استقبال کیا](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765892133176_dsc-8082-6425-jpg.webp&w=3840&q=75)

![[تصویر] ویتنامی خواتین کے فٹ بال کی سخت لڑائی کا جذبہ](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F17%2F1765990260956_ndo_br_4224760955870434771-copy-jpg.webp&w=3840&q=75)
![[تصویر] وزیر اعظم فام من چن نے لاؤ کے وزیر تعلیم اور کھیل تھونگسالتھ منگنورمیک کا استقبال کیا](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765876834721_dsc-7519-jpg.webp&w=3840&q=75)

































































![[لائیو] اختتامی تقریب اور "متاثر کن ویتنام سیاحت" ویڈیو/کلپ تخلیق مقابلہ 2025 کے لیے ایوارڈ پریزنٹیشن](https://vphoto.vietnam.vn/thumb/402x226/vietnam/resource/IMAGE/2025/12/17/1765974650260_z7273498850699-00d2fd6b0972cb39494cfa2559bf85ac-1765959338756946072104-627-0-1338-1138-crop-1765959347256801551121.jpeg)
























تبصرہ (0)