
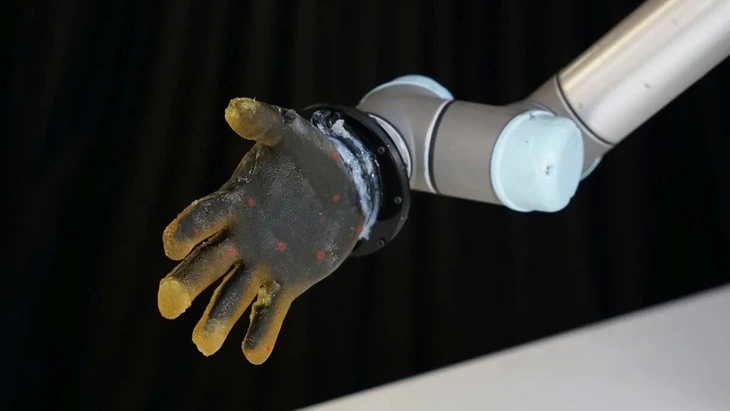
하이드로겔 피부를 갖춘 로봇 손의 클로즈업 - 사진: 케임브리지 대학교
더 이상 영화 속 이야기가 아닌, 오늘날 로봇은 점차 촉각, 온도, 심지어 부상까지 감지할 수 있는 능력을 갖추고 있습니다. 목표는 로봇에 감정을 부여하는 것이 아니라, 로봇이 유연하게 반응하고, 충돌로부터 학습하며, 실제 환경에서 인간을 더욱 안전하게 지원할 수 있도록 돕는 것입니다.
공상과학에서 실험실까지: 로봇이 "느끼기" 시작
오랫동안 촉각을 가진 로봇이라는 개념은 영화에서만 등장했습니다. 현실 세계에서는 로봇이 무감각한 도구이기 때문에 이러한 개념은 불필요하다고 여겨졌습니다. 하지만 로봇이 실제 환경에서 인간을 돕는 데 사용되면 이러한 개념이 장벽이 됩니다.
실제로 로봇이 생활 공간이나 병원에서 작업할 때, 특이한 상황에 대처하는 능력이 부족하여 위험으로 이어질 수 있습니다. 이로 인해 과학자들은 다시 한 번 질문을 던지게 됩니다. 로봇이 상황을 더 잘 처리하기 위해 인간처럼 "느껴져야" 할까요?
이 문제를 해결하기 위해 케임브리지 대학교와 UCL의 연구팀은 전도성 하이드로젤로 만든 인공 피부를 개발했습니다. 이 피부는 인간 피부가 감각 신호를 전달하는 방식을 모방할 수 있습니다. 이 피부는 로봇이 주변 환경의 물리적 자극을 정확하게 감지할 수 있도록 합니다.
Tuoi Tre Online 의 조사에 따르면, 독일의 막스 플랑크 연구소나 서울대학교 등 다른 많은 연구 센터도 이 방향을 추구하고 있으며, 이들은 자체 치유가 가능하고 정확한 촉각 피드백을 생성할 수 있는 부드러운 피부 기술을 개발하고 있습니다.
촉각 감각을 갖춘 로봇, 더욱 똑똑하게 행동하다
로봇이 느끼는 고통은 인간의 감정을 모방하기 위한 것이 아니라, 매우 실용적인 목적, 즉 로봇이 작업 중에 더욱 지능적이고 안전하게 대응할 수 있도록 돕기 위한 것입니다. 충격력이나 이상 온도를 감지할 수 있는 인공 피부를 통합하면 로봇이 자신이나 상호작용하는 사람에게 해를 끼칠 위험이 있을 때 이를 인식하는 데 도움이 됩니다.
로봇이 "고통을 느끼도록" 프로그래밍되면, 비정상적인 상황을 감지하면 힘을 조절하고, 위치를 변경하고, 작동을 중단합니다. 이는 로봇이 환자나 노인을 도울 수 있는 의료 환경에서 매우 중요합니다. 센서 피부를 갖춘 간호 로봇은 저항을 받으면 "물러서는" 것을 인식하여 환자에게 해를 끼치지 않고 더 부드럽게 작동합니다.
구조 분야에서는 온도나 진동을 감지하여 로봇이 위험 지역을 파악하고 신속하게 후퇴하는 데 도움을 줍니다. 이 기술은 장애인에게도 도움이 될 것으로 기대됩니다. 로봇 팔에 부착된 전자 피부는 움직일 때마다 촉각적 피드백을 제공합니다.
후미야 이이다 교수에 따르면, 이 팀의 목표는 감정을 만드는 것이 아니라 로봇의 자기 보호 반사 작용을 개발하는 것입니다.
촉각 에서 감정까지: 기술적 한계는 어디에 있을까?
로봇이 압력, 온도 변화에 반응하거나 상처를 감지할 수 있게 되면서, 많은 사람들이 궁금해하기 시작했습니다. 기계가 인간만이 가진 감정의 영역에 접근하고 있는 걸까요? 이러한 반응은 전적으로 프로그래밍의 결과이지만, 인간이 고통, 경계, 또는 두려움을 표현하는 방식과 점점 더 닮아가고 있습니다.
이러한 유사성 때문에 사용자에게 촉각과 감정의 경계가 모호해집니다. 로봇이 사람처럼 보이면서도 위험에 처했을 때 손을 떼면, 사용자는 감정적으로 애착을 느끼고, 심지어 이해받는다고 느끼기 쉽습니다.
정신 건강, 유아 교육 , 고객 서비스 등의 분야에서 이는 공감 능력을 키우는 강력한 도구가 될 수 있습니다. 하지만 로봇이 실제로 감정을 가지고 있다는 착각을 불러일으켜 기술에 대한 의존이나 오해로 이어질 위험도 있습니다.
과학자들은 로봇이 실제로 고통을 느끼지 않고 , 의식이나 감정도 없다고 강조합니다. 모든 행동은 미리 정해진 규칙에 대한 반응일 뿐입니다. 문제는 인간이 그러한 반응을 감정 표현으로 해석할 수 있다는 점이며, 이것이 바로 가까운 미래에 사회가 더욱 명확하게 논의해야 할 기술적 한계입니다.
출처: https://tuoitre.vn/robot-biet-dau-nhu-con-nguoi-nho-da-nhan-tao-20250717102826532.htm



![[사진] 다낭: 수백 명의 사람들이 13호 폭풍 이후 중요한 관광 루트를 청소하기 위해 손을 잡았습니다.](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/11/07/1762491638903_image-3-1353-jpg.webp)
































































































댓글 (0)