
 |
De Rubik's Kubus-oplossende machine die door een groep studenten is gemaakt, heeft een wereldrecord gevestigd. Foto: aangeleverd door het team . |
Een groep studenten van Purdue University heeft onlangs een nieuw Guinness World Record gevestigd met een robot die ze zelf hebben ontworpen. De robot is in staat om een Rubik's Kubus in slechts 0,103 seconden op te lossen. Dat is drie keer sneller dan het vorige record, dat door een andere robot was gevestigd.
Achter het record zat geen robot die sneller bewoog. Het studententeam combineerde een hogesnelheidscamerasysteem met een lage resolutie, een speciaal ontworpen Rubik's Kubus voor extra duurzaamheid en een speciale oplossingstechniek die populair is onder snelle Rubik's Kubus-oplossers.
Belangrijkste onderscheidende kenmerken ten opzichte van concurrenten.
De race om robots te bouwen die de Rubik's Kubus kunnen oplossen begon in 2014, toen een robot, samengesteld uit een Lego Mindstorms-set en aangedreven door een Samsung Galaxy S4-telefoon, de Rubik's Kubus in slechts 3,253 seconden oploste. In mei 2024 claimden ingenieurs van Mitsubishi Electric in Japan het wereldrecord met een robot die de Rubik's Kubus in 0,305 seconden oploste.
Om de tijd die de robot nodig had om de Rubik's Kubus op te lossen terug te brengen tot minder dan een halve seconde, liet het team het gebruik van Lego-onderdelen achterwege en gebruikte in plaats daarvan geoptimaliseerde onderdelen zoals industriële motoren. Maar om de 0,103 seconde te halen, verfijnde het team van Purdue de snelheid waarmee hun robot de verschuiving van de Rubik's Kubus kon "zien".
Bij de Speed Rubik's Cube-oplossers kunnen deelnemers de kubus bekijken voordat de timer start. De timer telt echter ook de tijd mee die de robot nodig heeft om de locatie van elk gekleurd vakje op de vlakken te bepalen.
De studentengroep gebruikte twee snelle machinevisiecamera's van Flir, met een resolutie van slechts 720x540 pixels, die op tegenoverliggende hoeken van de Rubik's Kubus waren geplaatst. Elke camera kon gelijktijdig drie vlakken van de kubus vastleggen in één opname van slechts 10 microseconden.
") |
De extreem snelle kleurherkenningstechnologie van de robot. Foto: aangeleverd door de auteur. |
Conventionele camera's hebben nog steeds tijd nodig om de gegevens van de sensor te verwerken en om te zetten in een digitale afbeelding. De Cube van Purdubik, de robot die door de studentengroep is ontwikkeld, gebruikt echter een speciaal ontworpen beeldherkenningssysteem dat deze beeldverwerkingsstap volledig overslaat.
Dit systeem concentreert zich op een zeer klein gebied (128x124 pixels) binnen het frame dat elke camera vastlegt, waardoor de hoeveelheid te verwerken data wordt verminderd. De ruwe data van de sensoren wordt direct naar een supersnel kleurdetectiesysteem gestuurd, dat RGB-waarden van nog kleinere steekproefgebieden gebruikt om de kleur sneller te bepalen dan zowel conventionele als AI-methoden.
Hoewel deze methode minder stabiel is, kan ze ervoor zorgen dat aan de belangrijkste eis van de groep wordt voldaan. "Zelfs als de nauwkeurigheid maar 90% is, is dat nog steeds goed genoeg. Wat we echt nodig hebben, is snelheid," aldus Patrohay, een student in de groep.
Optimaliseer het gehele systeem.
Patrohay betoogt dat elke eerdere recordbrekende robot doorgaans slechts één opvallend kenmerk verbeterde. De robot van het MIT-studententeam (2018) richtte zich op het gebruik van hoogwaardige industriële hardware. Het team van Mitsubishi Electric koos voor gespecialiseerde elektromotoren, geoptimaliseerd voor het roteren van elk vlak van de Rubik's Kubus.
Ondertussen koos het team van Purdue voor direct beschikbare software om het hele systeem te optimaliseren, van de camera en beeldverwerking tot de hardware en oplossingsalgoritmes. Ze gebruikten Elias Frantars Rob-Twophase, een Rubik's Kubus-oplossingsalgoritme dat specifiek voor robots is ontworpen, waardoor ze gebruik konden maken van speciale mogelijkheden zoals het gelijktijdig roteren van beide zijden van de Rubik's Kubus.
De groep gebruikte ook een techniek waarmee ze één kant van de Rubik's Kubus konden draaien voordat ze de andere kant, die er loodrecht op stond, volledig hadden gedraaid. Deze methode bespaart aanzienlijk veel tijd, maar brengt het risico met zich mee dat de Rubik's Kubus beschadigd raakt of zelfs breekt als de timing verkeerd is of er te veel kracht wordt gebruikt. Daarom moesten de studenten de Rubik's Kubus verder aanpassen om de kracht te kunnen weerstaan en soepel te kunnen werken met deze techniek.
Volgens de regels van de World Rubik's Cube Association (WCA) mogen deelnemers hun Rubik's Kubus aanpassen, zolang deze maar kan draaien en functioneert als een standaardkubus, met 9 gekleurde vierkantjes op elk vlak en 6 vlakken met 6 verschillende kleuren. Spelers mogen andere materialen dan plastic gebruiken, maar de gekleurde vlakken moeten dezelfde oppervlaktestructuur hebben.
") |
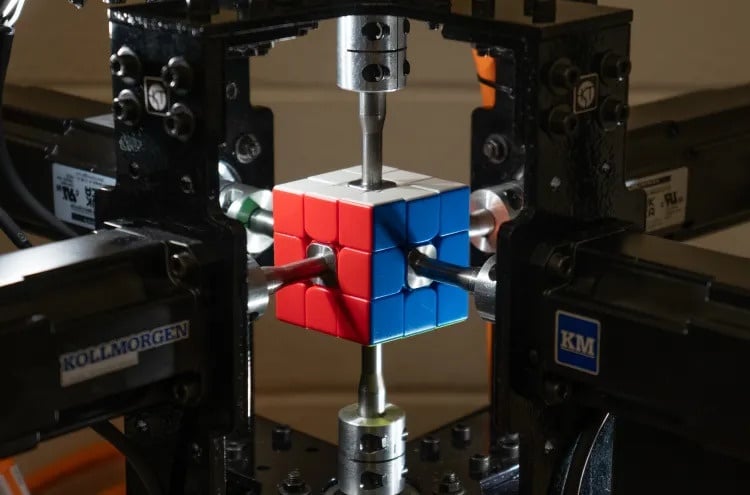
Aan de overige zijden worden zes van dergelijke motoren bevestigd, die de Rubik's Kubus zullen laten draaien. Foto: aangeleverd door de auteur. |
Om de duurzaamheid te vergroten, heeft het team van Purdue de interne structuur van de Rubik's Kubus verbeterd met een op maat gemaakte 3D-geprinte versie, gemaakt van een sterkere SLS-nylonhars. De verhoogde smering en spanning helpen tegelijkertijd overmatige rotatie te verminderen en de controle te verbeteren.
Purdubik's Cube gebruikt zes motoren die bevestigd zijn aan metalen assen in het midden van elk vlak van de Rubik's Kubus. Na te hebben geëxperimenteerd met verschillende methoden, koos het team voor een trapeziumvormig bewegingssysteem, zodat de robot elk vlak nauwkeurig kon uitlijnen wanneer hij stopte.
Patrohay gelooft dat Purdubik zijn eigen record zou kunnen verbeteren als de Rubik's Kubus duurzamer zou zijn en van een ander materiaal dan plastic gemaakt zou worden. "Als je een speciale Rubik's Kubus volledig van een koolstofvezelcomposiet zou maken, denk ik dat die hogere snelheden zou kunnen weerstaan. Dat zou je in staat stellen de tijd verder te verkorten," zei hij.
Bron: https://znews.vn/ben-trong-robot-giai-rubik-nhanh-nhat-the-gioi-post1557575.html

![[Afbeelding] De vasthoudende vechtlust van het Vietnamese vrouwenvoetbal](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F17%2F1765990260956_ndo_br_4224760955870434771-copy-jpg.webp&w=3840&q=75)
![[Foto] Premier Pham Minh Chinh ontvangt de Laotiaanse minister van Onderwijs en Sport Thongsalith Mangnormek](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765876834721_dsc-7519-jpg.webp&w=3840&q=75)
![[Foto] Premier Pham Minh Chinh ontvangt de gouverneur van de provincie Tochigi (Japan)](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765892133176_dsc-8082-6425-jpg.webp&w=3840&q=75)
![[Afbeelding] Gelekte afbeeldingen voorafgaand aan het Community Action Awards-gala van 2025.](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765882828720_ndo_br_thiet-ke-chua-co-ten-45-png.webp&w=3840&q=75)
![[Live] Gala van de Community Action Awards 2025](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765899631650_ndo_tr_z7334013144784-9f9fe10a6d63584c85aff40f2957c250-jpg.webp&w=3840&q=75)

































































![[Live] Afsluitingsceremonie en prijsuitreiking voor de video-/clipwedstrijd "Indrukwekkend Vietnamees Toerisme" 2025](https://vphoto.vietnam.vn/thumb/402x226/vietnam/resource/IMAGE/2025/12/17/1765974650260_z7273498850699-00d2fd6b0972cb39494cfa2559bf85ac-1765959338756946072104-627-0-1338-1138-crop-1765959347256801551121.jpeg)
























Reactie (0)