
أُطلق مشروع "سيرفس أفاتار" عام 2020، وتتولى إدارته وكالة الفضاء الألمانية بالتعاون مع وكالة الفضاء الأوروبية. يهدف المشروع إلى تطوير تقنية تُمكّن رواد الفضاء من التحكم بشكل مستقل ومتزامن في عدة روبوتات بدقة عالية، أو تشغيلها بشكل شبه مستقل أو مستقل تمامًا في بيئة الفضاء. ويُؤمل أن تُستخدم هذه الأنظمة الروبوتية لدعم رحلات استكشاف سطح القمر والمريخ عندما يعود البشر لاستكشاف سطح القمر.
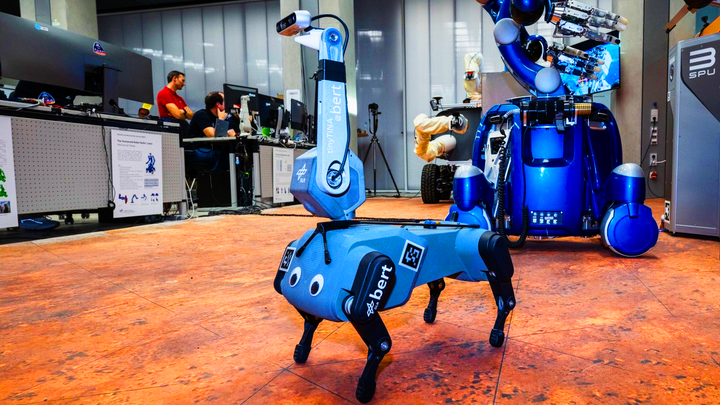
يتلقى الروبوت بيرت، الذي يشبه الكلب، مساعدة في التحكم من رائد فضاء في الفضاء. (صورة: وكالة الفضاء الأوروبية/أندرياس موجنسن/X).
لذلك، قام ماركوس واندت، رائد الفضاء التابع لوكالة الفضاء الأوروبية، مؤخراً بقيادة الروبوت بيرت، وهو روبوت رباعي الأرجل يشبه الكلب، من الفضاء لأول مرة على متن محطة الفضاء الدولية. أجرى ماركوس واندت هذه التجربة لاختبار كيفية تأثير التأخير الزمني على التحكم بالروبوت خلال المهمات الفضائية.
أثناء الاختبارات، كان واندت على متن وحدة كولومبوس التابعة لمحطة الفضاء الدولية، وقاد الروبوت بيرت الموجود في مختبر المريخ في منشأة أوبربفافنهوفن التابعة لوكالة الفضاء الألمانية. وأظهرت سلسلة من الاختبارات أن واندت سيطر على ثلاثة روبوتات مختلفة، وبدأ بالروبوت بيرت.
بعد أن سيطر واندت على بيرت لفترة من الوقت، سمح للروبوت بالاستكشاف بشكل مستقل في بيئة محاكاة، بينما سيطر أيضًا على روبوت الخدمة البشري ذي العجلات التابع لوكالة الفضاء الألمانية رولين جاستن، ومركبة إنترأكت روفر التابعة لوكالة الفضاء الأوروبية.

نجح رائد الفضاء ماركوس واندت في اختبار التحكم في بيرت، وهو روبوت رباعي الأرجل يشبه الكلب. (صورة: وكالة الفضاء الأوروبية/أندرياس موجنسن/X).
استغرقت التجربة، التي شملت عدة روبوتات، ساعتين ونصف، وأُنجزت بنجاح تام. وصرح مدير المشروع في وكالة الفضاء الألمانية قائلاً: "إن تمكين روبوت بيرت من العمل على أرجل بدلاً من عجلات، سيمكنه من تسلق التلال أو الزحف إلى الكهوف على سطح المريخ، أو عوالم أخرى خارج كوكب الأرض، بسهولة أكبر".
وأشار مسؤول آخر من وكالة الفضاء الألمانية إلى أنه حتى الآن، لم يتم التحكم عن بُعد إلا بالروبوتات ذات العجلات من قِبل رواد الفضاء. لكن بيرت أتقن أنماط مشي متعددة، وبفضل مرونة حركة ساقيه، يستطيع حتى استكشاف التضاريس الوعرة، بما في ذلك الكهوف.
هوينه دونغ (المصدر: الفضاء/رحلات الفضاء الأوروبية)
مصدر






































































































تعليق (0)