
 |
دستگاه حل مکعب روبیک که توسط گروهی از دانشآموزان ساخته شده، رکورد جهانی را ثبت کرده است. عکس: ارائه شده توسط تیم . |
گروهی از دانشجویان دانشگاه پردو اخیراً با رباتی که خودشان طراحی کردهاند، رکورد جهانی گینس جدیدی را ثبت کردند که قادر به حل مکعب روبیک تنها در ۰.۱۰۳ ثانیه است. این سه برابر سریعتر از رکورد قبلی ثبت شده توسط یک ربات دیگر است.
پشت این رکورد، رباتی که سریعتر حرکت میکرد، نبود. تیم دانشجویی یک سیستم دوربین پرسرعت اما با وضوح پایین، یک مکعب روبیک با طراحی سفارشی برای افزایش دوام و یک تکنیک حل ویژه که در بین حلکنندگان سریع مکعب روبیک محبوب است را با هم ترکیب کردند.
وجوه تمایز کلیدی در مقایسه با رقبا.
رقابت برای ساخت رباتهای حلکننده مکعب روبیک در سال ۲۰۱۴ آغاز شد، زمانی که یک ربات مونتاژ شده از کیت لگو ماینداستورمز و با استفاده از یک گوشی سامسونگ گلکسی S4 مکعب روبیک را تنها در ۳.۲۵۳ ثانیه حل کرد. در ماه مه ۲۰۲۴، مهندسان میتسوبیشی الکتریک در ژاپن رکورد جهانی را با رباتی که مکعب روبیک را در ۰.۳۰۵ ثانیه حل کرد، به نام خود ثبت کردند.
برای کاهش زمان حل مکعب روبیک ربات به زیر نیم ثانیه، تیم استفاده از قطعات لگو را کنار گذاشت و در عوض از قطعات بهینه شده مانند موتورهای صنعتی استفاده کرد. اما برای رسیدن به رکورد ۰.۱۰۳ ثانیه، تیم پردو سرعتی را که ربات آنها میتوانست درهمآمیختگی مکعب روبیک را "ببیند" اصلاح کرد.
حلکنندگان سریع مکعب روبیک میتوانند مکعب را قبل از شروع تایمر مشاهده کنند. با این حال، تایمر همچنین زمانی را که ربات برای شناسایی محل هر مربع رنگی روی وجوه نیاز دارد، در نظر میگیرد.
این گروه از دانشجویان از دو دوربین بینایی ماشین پرسرعت از شرکت Flir با وضوح تنها ۷۲۰x۵۴۰ پیکسل استفاده کردند که در گوشههای مقابل مکعب روبیک قرار داده شده بودند. هر دوربین میتوانست به طور همزمان سه وجه مکعب را در یک تصویر که تنها ۱۰ میکروثانیه طول میکشید، مشاهده کند.
") |
فناوری تشخیص رنگ بسیار سریع این ربات. عکس: ارائه شده توسط نویسنده. |
دوربینهای معمولی هنوز برای پردازش دادههای حسگر و تبدیل آن به تصویر دیجیتال به زمان نیاز دارند. با این حال، ربات Purdubik's Cube که توسط این گروه دانشجویی ساخته شده است، از یک سیستم تشخیص تصویر سفارشی استفاده میکند که این مرحله پردازش تصویر را به طور کامل نادیده میگیرد.
این سیستم روی یک ناحیه بسیار کوچک (۱۲۸x۱۲۴ پیکسل) در فریمی که هر دوربین ثبت میکند، تمرکز میکند و میزان دادههایی را که باید پردازش شوند، کاهش میدهد. دادههای خام از حسگرها مستقیماً به یک سیستم تشخیص رنگ پرسرعت ارسال میشوند که از مقادیر RGB از مناطق نمونه حتی کوچکتر برای تعیین رنگ سریعتر از روشهای مرسوم و هوش مصنوعی استفاده میکند.
اگرچه این روش پایداری کمتری دارد، اما میتواند تضمین کند که نیاز اصلی گروه برآورده میشود. پاتروهی، یکی از دانشجویان گروه، گفت: «حتی اگر دقت فقط ۹۰٪ باشد، باز هم کافی است. چیزی که ما واقعاً به آن نیاز داریم سرعت است.»
کل سیستم را بهینه کنید.
پاتروهی استدلال میکند که هر ربات رکوردشکن قبلی معمولاً فقط یک ویژگی برجسته را بهبود میبخشید. ربات تیم دانشجویی MIT (2018) بر استفاده از سختافزار صنعتی با کارایی بالا تمرکز داشت. تیم میتسوبیشی الکتریک موتورهای الکتریکی تخصصی را انتخاب کرد که برای چرخاندن هر وجه مکعب روبیک بهینه شده بودند.
در همین حال، تیم پردو برای بهینهسازی کل سیستم، از دوربین و پردازش تصویر گرفته تا سختافزار و الگوریتمهای حل، از نرمافزارهای در دسترس استفاده کرد. آنها از Rob-Twophase الیاس فرانتار، یک الگوریتم حل مکعب روبیک که بهطور خاص برای رباتها طراحی شده است، استفاده کردند و به آنها اجازه دادند از قابلیتهای ویژهای مانند چرخاندن همزمان هر دو طرف مکعب روبیک استفاده کنند.
این گروه همچنین از تکنیکی استفاده کردند که به آنها اجازه میدهد قبل از تکمیل چرخش ضلع دیگر مکعب روبیک به صورت عمود بر آن، چرخش یک طرف آن را شروع کنند. این روش باعث صرفهجویی قابل توجهی در زمان میشود، اما اگر زمانبندی اشتباه باشد یا نیروی زیادی استفاده شود، خطر آسیب دیدن یا حتی خرد شدن مکعب روبیک وجود دارد. بنابراین، دانشآموزان مجبور شدند مکعب روبیک را بیشتر سفارشی کنند تا در برابر نیرو مقاومت کند و با این تکنیک به راحتی کار کند.
طبق قوانین انجمن جهانی مکعب روبیک (WCA)، شرکتکنندگان میتوانند مکعب روبیک خود را سفارشی کنند، البته تا زمانی که همچنان بتواند بچرخد و مانند یک مکعب استاندارد عمل کند، با ۹ مربع رنگی در هر وجه، و ۶ وجه با ۶ رنگ مختلف. بازیکنان میتوانند از موادی غیر از پلاستیک استفاده کنند، اما بخشهای رنگی باید بافت سطحی یکسانی داشته باشند.
") |
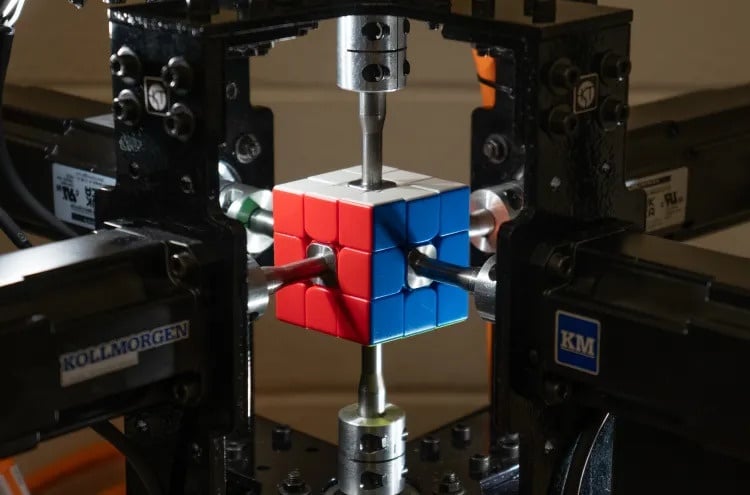
شش موتور مانند این به اضلاع باقی مانده متصل خواهند شد که وظیفه چرخاندن مکعب روبیک را بر عهده دارند. عکس: ارائه شده توسط نویسنده. |
برای افزایش دوام، تیم پردو ساختار داخلی مکعب روبیک را با یک نسخه چاپ سهبعدی سفارشی با استفاده از رزین نایلونی SLS سختتر ارتقا داد. افزایش روانکاری و کشش به طور همزمان به کاهش چرخش بیش از حد و بهبود کنترل کمک میکند.
مکعب پردوبیک از شش موتور متصل به شفتهای فلزی واقع در مرکز هر وجه مکعب روبیک استفاده میکند. پس از آزمایش روشهای مختلف، تیم تصمیم گرفت از یک سیستم حرکتی ذوزنقهای استفاده کند تا ربات بتواند هنگام توقف، هر وجه را دقیقاً تراز کند.
پاتروهی معتقد است که اگر مکعب روبیک بادوامتر باشد و از مادهای غیر از پلاستیک ساخته شود، پوردوبیک میتواند رکورد خودش را بشکند. او گفت: «اگر یک مکعب روبیک تخصصی را کاملاً از کامپوزیت فیبر کربن بسازید، فکر میکنم در سرعتهای بالاتر مقاومت خواهد کرد. این به شما امکان میدهد زمان را بیشتر کوتاه کنید.»
منبع: https://znews.vn/ben-trong-robot-giai-rubik-nhanh-nhat-the-gioi-post1557575.html

![[تصویر] روحیه سرسخت مبارزه در فوتبال زنان ویتنامی](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F17%2F1765990260956_ndo_br_4224760955870434771-copy-jpg.webp&w=3840&q=75)
![[تصویر] تصاویر لو رفته پیش از مراسم اهدای جوایز اقدامات اجتماعی ۲۰۲۵.](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765882828720_ndo_br_thiet-ke-chua-co-ten-45-png.webp&w=3840&q=75)
![[عکس] نخست وزیر فام مین چین از استاندار استان توچیگی (ژاپن) استقبال کرد](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765892133176_dsc-8082-6425-jpg.webp&w=3840&q=75)
![[زنده] مراسم اهدای جوایز اقدامات اجتماعی ۲۰۲۵](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765899631650_ndo_tr_z7334013144784-9f9fe10a6d63584c85aff40f2957c250-jpg.webp&w=3840&q=75)
![[عکس] نخست وزیر فام مین چین از وزیر آموزش و ورزش لائوس، تونگسالیت مانگنورمک، استقبال کرد.](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765876834721_dsc-7519-jpg.webp&w=3840&q=75)

































































![[زنده] مراسم اختتامیه و اهدای جوایز مسابقه ساخت ویدیو/کلیپ «گردشگری چشمگیر ویتنام» ۲۰۲۵](https://vphoto.vietnam.vn/thumb/402x226/vietnam/resource/IMAGE/2025/12/17/1765974650260_z7273498850699-00d2fd6b0972cb39494cfa2559bf85ac-1765959338756946072104-627-0-1338-1138-crop-1765959347256801551121.jpeg)
























نظر (0)