
 |
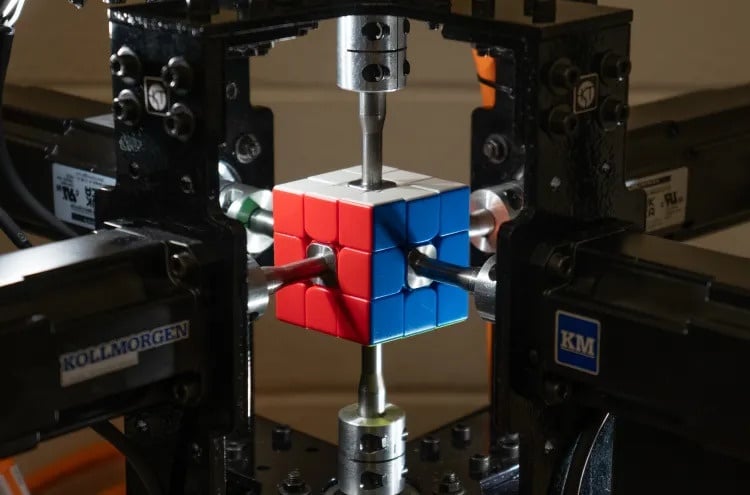
学生グループが製作したルービックキューブを解くマシンが世界記録を樹立した。写真:チーム提供。 |
パデュー大学の学生グループが先日、自ら設計したロボットでルービックキューブをわずか0.103秒で解くというギネス世界記録を樹立しました。これは、以前別のロボットが樹立した記録の3倍の速さです。
この記録の陰には、より速く動くロボットの力があったわけではない。学生チームは、高速だが解像度の低いカメラシステム、耐久性を高めるために特注設計されたルービックキューブ、そしてスピードルービックキューブを解く人々に人気の特殊な解法を組み合わせ、この記録を樹立した。
競合他社と比較した主な差別化要因。
ルービックキューブを解くロボットの開発競争は2014年に始まりました。当時、レゴマインドストームのキットとサムスンギャラクシーS4スマートフォンで組み立てられたロボットが、わずか3.253秒でルービックキューブを解いたのです。2024年5月には、日本の三菱電機のエンジニアたちが、ロボットがルービックキューブを0.305秒で解くという世界記録を樹立しました。
ロボットのルービックキューブ解時間を0.5秒未満に短縮するために、チームはレゴ部品の使用を断念し、代わりに産業用モーターなどの最適化された部品を使用しました。しかし、0.103秒というタイムを達成するため、パデュー大学のチームはロボットがルービックキューブの乱れを「見る」速度をさらに向上させました。
スピードルービックキューブのソルバーは、タイマーがスタートする前にキューブを観察できます。ただし、タイマーには、ロボットがキューブの各面にある色のついた正方形の位置を特定するのにかかる時間も考慮されます。
学生グループは、解像度わずか720×540ピクセルのFLIR社製高速マシンビジョンカメラ2台をルービックキューブの対角に設置しました。各カメラは、わずか10マイクロ秒の1回の撮影でキューブの3面を同時に観察することができました。
") |
ロボットの超高速な色認識技術。写真:著者提供 |
従来のカメラでは、センサーからのデータを処理してデジタル画像に変換するのに時間がかかります。しかし、学生グループが開発したロボット「Purdubik's Cube」は、この画像処理のステップを完全に省略する独自の画像認識システムを採用しています。
このシステムは、各カメラが記録するフレーム内の非常に小さな領域(128×124ピクセル)に焦点を当てることで、処理に必要なデータ量を削減します。センサーからの生データは高速色検出システムに直接送信され、さらに小さなサンプル領域のRGB値を使用して、従来の方法やAIによる方法よりも高速に色を判定します。
この方法は安定性に欠けるものの、グループの主要な要件を確実に満たすことができます。「たとえ精度が90%であっても、それでも十分です。本当に必要なのはスピードです」と、グループの学生であるパトロハイさんは語りました。
システム全体を最適化します。
パトロヘイ氏は、これまでの記録破りのロボットは、典型的には1つの優れた機能しか改良していなかったと主張している。MITの学生チーム(2018年)が開発したロボットは、高性能な産業用ハードウェアの使用に重点を置いた。三菱電機のチームは、ルービックキューブの各面を回転させるのに最適化された特殊な電動モーターを採用した。
一方、パデュー大学のチームは、カメラや画像処理からハードウェア、そして解法アルゴリズムに至るまで、システム全体を最適化するために、すぐに利用できるソフトウェアを選択しました。彼らは、ロボット向けに特別に設計されたルービックキューブ解法アルゴリズムであるエリアス・フランターのRob-Twophaseを使用しました。これにより、ロボットはルービックキューブの両面を同時に回転させるといった特殊な機能を活用できるようになりました。
グループはまた、ルービックキューブの片面を回転させてから、もう片面をその面と垂直に回転させることで、もう片面を回転させ終えるというテクニックも活用しました。この方法は時間を大幅に節約できますが、タイミングがずれたり、力を入れすぎたりすると、ルービックキューブが損傷したり、場合によっては破損したりするリスクがあります。そのため、生徒たちは、このテクニックで力に耐え、スムーズに動作するように、ルービックキューブをさらにカスタマイズする必要がありました。
世界ルービックキューブ協会(WCA)のルールによると、参加者はルービックキューブを自由にカスタマイズできます。ただし、標準的なキューブと同様に回転し、各面に9つの色の正方形があり、6つの面にそれぞれ6色の正方形がある必要があります。プラスチック以外の素材も使用できますが、色付きの部分の表面の質感は同じである必要があります。
") |
残りの面にもこのようなモーターが6つ取り付けられ、ルービックキューブを回転させる役割を担う。写真:著者提供 |
耐久性を高めるため、パデュー大学のチームは、より強度の高いSLSナイロン樹脂を用いたカスタム3Dプリント版でルービックキューブの内部構造を改良しました。潤滑性と張力を高めることで、過回転の抑制とコントロール性の向上を実現しました。
パードゥビック・キューブは、ルービックキューブの各面の中央に配置された金属シャフトに取り付けられた6つのモーターを使用しています。様々な方法を試した結果、チームはロボットが停止時に各面を正確に一直線に並べることができるよう、台形運動システムを採用しました。
パトロハイ氏は、ルービックキューブがより耐久性が高く、プラスチック以外の素材で作られていれば、パードゥビック氏が自身の記録を破れる可能性があると考えている。「もし、炭素繊維複合材だけで作られた特別なルービックキューブを作れば、より高い速度にも耐えられると思います。そうすれば、さらにタイムを短縮できるでしょう」と彼は語った。
出典: https://znews.vn/ben-trong-robot-giai-rubik-nhanh-nhat-the-gioi-post1557575.html




































































































コメント (0)