
 |
학생들이 제작한 루빅 큐브 풀이 기계가 세계 신기록을 세웠습니다. 사진: 제작팀 제공 . |
퍼듀대학교 학생들이 직접 설계한 로봇으로 기네스 세계 신기록을 세웠습니다. 이 로봇은 루빅큐브를 단 0.103초 만에 맞추는 데 성공했는데, 이는 기존에 다른 로봇이 세웠던 기록보다 세 배나 빠른 기록입니다.
기록 경신의 비결은 단순히 더 빠른 로봇이 아니었습니다. 학생 팀은 고속이지만 해상도가 낮은 카메라 시스템, 내구성을 높이기 위해 특별히 설계된 루빅 큐브, 그리고 속공 루빅 큐브 전문가들 사이에서 널리 사용되는 특수 해법 기술을 결합했습니다.
경쟁사 대비 주요 차별점.
루빅 큐브를 푸는 로봇 개발 경쟁은 2014년 레고 마인드스톰 키트로 조립하고 삼성 갤럭시 S4 스마트폰을 사용한 로봇이 3.253초 만에 루빅 큐브를 풀면서 시작되었습니다. 그리고 2024년 5월, 일본 미쓰비시 전기 엔지니어들은 0.305초 만에 루빅 큐브를 푸는 로봇으로 세계 신기록을 세웠습니다.
로봇의 루빅 큐브 풀이 시간을 0.5초 미만으로 줄이기 위해, 연구팀은 레고 부품 사용을 포기하고 산업용 모터와 같은 최적화된 부품을 사용했습니다. 하지만 0.103초라는 기록을 달성하기 위해, 퍼듀 연구팀은 로봇이 루빅 큐브의 섞인 상태를 "인식"하는 속도를 정밀하게 조정했습니다.
빠른 루빅 큐브 해결 로봇은 타이머가 시작되기 전에 큐브를 관찰할 수 있습니다. 하지만 타이머는 로봇이 각 면에 있는 색깔 사각형의 위치를 파악하는 데 걸리는 시간도 고려합니다.
학생들은 Flir 사의 720x540 픽셀 해상도를 가진 고속 머신 비전 카메라 두 대를 루빅 큐브의 마주보는 모서리에 설치했습니다. 각 카메라는 단 10마이크로초 만에 큐브의 세 면을 동시에 관찰할 수 있었습니다.
") |
이 로봇은 매우 빠른 색상 인식 기술을 갖추고 있습니다. 사진: 저자 제공. |
기존 카메라는 센서에서 데이터를 처리하고 디지털 이미지로 변환하는 데 시간이 걸립니다. 하지만 학생 그룹이 제작한 로봇인 퍼두빅 큐브는 이러한 이미지 처리 단계를 완전히 생략하는 맞춤형 이미지 인식 시스템을 사용합니다.
이 시스템은 각 카메라가 기록하는 프레임 내의 매우 작은 영역(128x124 픽셀)에 초점을 맞춰 처리해야 하는 데이터 양을 줄입니다. 센서에서 얻은 원시 데이터는 고속 색상 감지 시스템으로 직접 전송되며, 이 시스템은 훨씬 더 작은 샘플 영역의 RGB 값을 사용하여 기존 방식이나 AI 방식보다 훨씬 빠르게 색상을 판별합니다.
이 방법은 안정성은 떨어지지만, 그룹의 주요 요구 사항을 충족할 수 있습니다. 그룹 구성원인 파트로하이는 "정확도가 90%밖에 안 되더라도 충분히 괜찮습니다. 우리에게 정말 필요한 건 속도니까요."라고 말했습니다.
전체 시스템을 최적화하십시오.
파트로헤이는 이전의 기록 경신 로봇들이 일반적으로 하나의 뛰어난 기능만 개선했다고 주장합니다. MIT 학생팀(2018)의 로봇은 고성능 산업용 하드웨어 사용에 중점을 두었습니다. 미쓰비시 전기팀은 루빅 큐브의 각 면을 회전시키는 데 최적화된 특수 전기 모터를 선택했습니다.
한편, 퍼듀 연구팀은 카메라와 이미지 처리부터 하드웨어 및 해결 알고리즘에 이르기까지 전체 시스템을 최적화하기 위해 쉽게 구할 수 있는 소프트웨어를 선택했습니다. 그들은 로봇을 위해 특별히 설계된 루빅 큐브 해결 알고리즘인 엘리아스 프란타르의 Rob-Twophase를 사용하여 루빅 큐브의 양면을 동시에 회전시키는 등의 특수 기능을 활용할 수 있었습니다.
이 그룹은 루빅 큐브의 한쪽 면을 먼저 회전시킨 후, 그에 수직인 다른 쪽 면의 회전을 완료하는 기술을 활용했습니다. 이 방법은 시간을 상당히 절약해 주지만, 타이밍이 맞지 않거나 너무 많은 힘을 가하면 루빅 큐브가 손상되거나 심지어 깨질 위험이 있습니다. 따라서 학생들은 이러한 기술을 사용할 때 발생하는 힘을 견디고 부드럽게 작동하도록 루빅 큐브를 추가로 개조해야 했습니다.
세계 루빅큐브 협회(WCA) 규정에 따르면, 참가자는 표준 큐브처럼 회전하고 작동할 수 있는 한, 즉 각 면에 9개의 색깔 정사각형이 있고 6개의 면에 각각 다른 색깔이 있는 한, 자신만의 루빅큐브를 만들 수 있습니다. 플라스틱 이외의 재료를 사용할 수도 있지만, 색깔이 있는 부분은 표면 질감이 동일해야 합니다.
") |
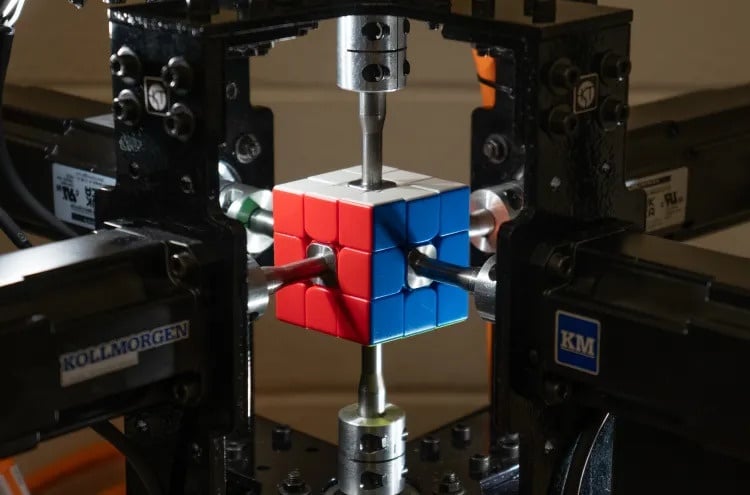
이와 같은 모터 6개가 나머지 면에 부착되어 루빅 큐브를 회전시키는 역할을 맡게 됩니다. 사진: 저자 제공. |
내구성을 높이기 위해 퍼듀 연구팀은 더욱 견고한 SLS 나일론 수지를 사용한 맞춤형 3D 프린팅 기술로 루빅 큐브의 내부 구조를 업그레이드했습니다. 윤활성과 장력이 동시에 증가하여 과도한 회전을 줄이고 제어력을 향상시켰습니다.
퍼두빅 큐브는 루빅 큐브 각 면의 중앙에 위치한 금속 축에 부착된 6개의 모터를 사용합니다. 다양한 방법을 실험한 끝에, 로봇이 정지했을 때 각 면을 정확하게 정렬할 수 있도록 사다리꼴 형태의 이동 시스템을 선택했습니다.
파트로헤이는 루빅 큐브가 더 튼튼하고 플라스틱이 아닌 다른 재질로 만들어졌다면 푸르두빅이 자신의 기록을 깰 수 있었을 것이라고 믿는다. 그는 "만약 탄소 섬유 복합재로 완전히 특수 제작된 루빅 큐브를 만든다면 더 빠른 속도를 견딜 수 있을 것입니다. 그렇게 되면 시간을 더욱 단축할 수 있을 겁니다."라고 말했다.
출처: https://znews.vn/ben-trong-robot-giai-rubik-nhanh-nhat-the-gioi-post1557575.html
![[이미지] 베트남 여자 축구의 불굴의 투지](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F17%2F1765990260956_ndo_br_4224760955870434771-copy-jpg.webp&w=3840&q=75)
![[생중계] 2025 지역사회 활동 시상식](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765899631650_ndo_tr_z7334013144784-9f9fe10a6d63584c85aff40f2957c250-jpg.webp&w=3840&q=75)
![[이미지] 2025년 지역사회 활동상 시상식을 앞두고 유출된 이미지.](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765882828720_ndo_br_thiet-ke-chua-co-ten-45-png.webp&w=3840&q=75)

![[사진] 팜 민 찐 총리가 일본 도치기성 지사를 접견하고 있다.](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765892133176_dsc-8082-6425-jpg.webp&w=3840&q=75)
![[사진] 팜 민 찐 총리가 통살릿 망노르멕 라오스 교육체육부 장관을 접견하고 있다.](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765876834721_dsc-7519-jpg.webp&w=3840&q=75)

































































![[생중계] 2025년 "인상적인 베트남 관광" 영상/클립 제작 공모전 폐막식 및 시상식](https://vphoto.vietnam.vn/thumb/402x226/vietnam/resource/IMAGE/2025/12/17/1765974650260_z7273498850699-00d2fd6b0972cb39494cfa2559bf85ac-1765959338756946072104-627-0-1338-1138-crop-1765959347256801551121.jpeg)























댓글 (0)