
이탈리아 공과대학(IIT)이 제트 터빈으로 비행할 수 있는 세계 최초의 휴머노이드 로봇인 iRonCub3를 개발한 것은 이번이 가장 최근의 성과입니다. 이 제품은 다지형 로봇 연구, 특히 첨단 기술의 지원이 점점 더 필요한 구조 및 재난 대응 분야에서 전환점을 마련했습니다.
iRonCub3에는 팔에 두 개, 등에 두 개씩 총 네 개의 제트 엔진이 장착되어 있으며, 이 엔진은 1,000뉴턴 이상의 추력을 발생시켜 70kg의 로봇 몸체를 지면에서 들어 올릴 수 있습니다. 티타늄 척추와 내열 쉘은 최대 800°C의 고온 배기가스로부터 로봇을 보호하여 작동 중 안전을 보장합니다.

iRonCub3 - 제트기를 타고 비행하는 최초의 인간형 로봇이 성공적으로 이륙했습니다. 사진: 유튜브 인공지능 및 기계 지능
대칭적이고 안정적인 드론과 달리, 인간형 형태와 유연한 팔다리를 가진 로봇은 공기역학적 변동을 일으키고 무게 중심을 끊임없이 변화시킵니다. 이러한 문제를 해결하기 위해 IIT 팀은 밀라노 공과대학 및 스탠퍼드 대학교와 협력하여 시뮬레이션과 실제 데이터로 훈련된 신경망을 사용하는 AI 기반 비행 제어 시스템을 개발했습니다. 이를 통해 iRonCub3는 비행 자세를 조정하고, 난류에 대처하며, 이륙 시 제트를 순차적으로 발사할 수 있습니다.
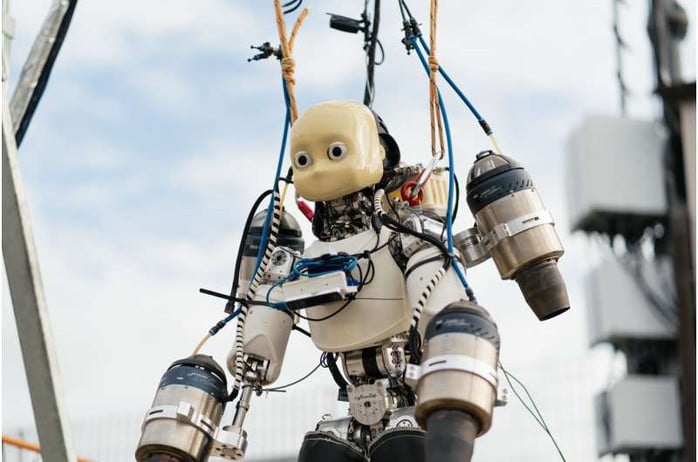
iRonCub3는 팔에 장착된 2개 엔진과 뒷면에 장착된 2개 엔진을 포함하여 총 4개의 제트 엔진을 통합했습니다. 사진: IIT
이 로봇의 개발에는 "공동 설계" 기법이 적용되었으며, 최고의 비행 성능을 달성하기 위해 동체 형상과 엔진 장착 위치를 최적화했습니다. 일련의 시뮬레이션 테스트, 열 제어, 추력 센서, 이착륙 알고리즘을 면밀히 개선했습니다.
IIT 기계인공지능연구소(AMI 랩) 소장인 다니엘레 푸치에 따르면, 이 로봇의 설계는 더욱 가혹하고 예측 불가능한 환경에서의 작동 능력을 확장하는 것을 목표로 합니다. iRonCub은 재난 구호 임무, 위험한 환경 측량, 그리고 복잡한 구조물이 있는 밀폐된 공간에서의 자율 주행에 사용될 수 있습니다.
가까운 미래에 iRonCub3는 제노바 공항에서 야외 테스트를 계속할 것으로 예상되며, 이를 통해 비행 로봇 기술을 현실 세계에 통합하기 위한 추가 단계를 준비할 것입니다.
출처: https://nld.com.vn/robot-hinh-nguoi-biet-bay-dau-tien-tren-the-gioi-196250621224223724.htm


![[사진] 동나이를 지나는 고속도로](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/11/12/1762940149627_ndo_br_1-resize-5756-jpg.webp)

![[사진] 팜 민 찐 총리가 기초 수준에서 안보와 질서를 보호하기 위해 군대를 배치한 지 1년이 지났음을 검토하는 회의에 참석하고 있다.](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/11/12/1762957553775_dsc-2379-jpg.webp)






























































































![동나이 OCOP 전환: [제3조] 관광과 OCOP 제품 소비 연계](https://vphoto.vietnam.vn/thumb/402x226/vietnam/resource/IMAGE/2025/11/10/1762739199309_1324-2740-7_n-162543_981.jpeg)






댓글 (0)