
 |
Bir grup öğrenci tarafından geliştirilen Rubik Küpü çözme makinesi dünya rekoru kırdı. Fotoğraf: Ekip tarafından sağlanmıştır . |
Purdue Üniversitesi'nden bir grup öğrenci, kendi tasarladıkları bir robotla Rubik Küpünü sadece 0.103 saniyede çözerek yeni bir Guinness Dünya Rekoru kırdı. Bu, başka bir robot tarafından kırılan önceki rekorun üç katı daha hızlı.
Rekorun ardında daha hızlı hareket eden bir robot yoktu. Öğrenci ekibi, yüksek hızlı ancak düşük çözünürlüklü bir kamera sistemini, dayanıklılığı artırmak için özel olarak tasarlanmış bir Rubik Küpünü ve hızlı Rubik Küpü çözücüler arasında popüler olan özel bir çözme tekniğini bir araya getirdi.
Rakiplerden farklılaşan temel özellikler.
Rubik Küpü çözen robotlar yapma yarışı, 2014 yılında bir Lego Mindstorms kiti ve Samsung Galaxy S4 telefonu kullanılarak birleştirilen bir robotun Rubik Küpünü sadece 3.253 saniyede çözmesiyle başladı. Mayıs 2024'te Japonya'daki Mitsubishi Electric mühendisleri, bir robotun Rubik Küpünü 0.305 saniyede çözmesiyle dünya rekorunu ele geçirdi.
Robotun Rubik Küpü çözme süresini yarım saniyenin altına indirmek için ekip, Lego parçalarının kullanımından vazgeçti ve bunun yerine endüstriyel motorlar gibi optimize edilmiş parçalar kullandı. Ancak 0,103 saniyelik dereceye ulaşmak için Purdue ekibi, robotlarının Rubik Küpünün karışıklığını "görebilme" hızını iyileştirdi.
Hızlı Rubik Küpü çözücüler, zamanlayıcı başlamadan önce küpü gözlemleyebilirler. Ancak zamanlayıcı, robotun küpün yüzlerindeki her renkli karenin yerini belirlemesi için geçen süreyi de hesaba katacaktır.
Öğrenci grubu, Rubik Küpü'nün zıt köşelerine yerleştirilmiş, çözünürlüğü yalnızca 720x540 piksel olan Flir marka iki yüksek hızlı makine görüş kamerası kullandı. Her kamera, yalnızca 10 mikrosaniye süren tek bir çekimde küpün üç yüzünü aynı anda gözlemleyebiliyordu.
") |
Robotun son derece hızlı renk tanıma teknolojisi. Fotoğraf: Yazar tarafından sağlanmıştır. |
Geleneksel kameralar, sensörden gelen verileri işlemek ve dijital görüntüye dönüştürmek için hala zamana ihtiyaç duyar. Ancak öğrenci grubu tarafından geliştirilen Purdubik Küpü adlı robot, bu görüntü işleme adımını tamamen atlayan özel bir görüntü tanıma sistemi kullanıyor.
Bu sistem, her kameranın kaydettiği kare içindeki çok küçük bir alana (128x124 piksel) odaklanarak işlenmesi gereken veri miktarını azaltır. Sensörlerden gelen ham veriler doğrudan yüksek hızlı bir renk algılama sistemine gönderilir; bu sistem, daha küçük örnek bölgelerden elde edilen RGB değerlerini kullanarak rengi hem geleneksel hem de yapay zeka yöntemlerinden daha hızlı belirler.
Bu yöntem daha az istikrarlı olsa da, grubun temel gereksiniminin karşılanmasını sağlayabilir. Gruptaki öğrencilerden Patrohay, "Doğruluk oranı sadece %90 olsa bile, bu yine de yeterince iyi. Bize gerçekten gereken şey hız," dedi.
Tüm sistemi optimize edin.
Patrohay, önceki rekor kıran robotların genellikle yalnızca tek bir üstün özelliği geliştirdiğini savunuyor. MIT öğrenci ekibinin (2018) robotu, yüksek performanslı endüstriyel donanım kullanmaya odaklandı. Mitsubishi Electric ekibi, Rubik Küpünün her yüzünü döndürmek için optimize edilmiş özel elektrik motorları seçti.
Bu arada, Purdue ekibi, kameradan ve görüntü işlemeden donanıma ve çözüm algoritmalarına kadar tüm sistemi optimize etmek için hazır bulunan yazılımları tercih etti. Robotlar için özel olarak tasarlanmış bir Rubik Küpü çözme algoritması olan Elias Frantar'ın Rob-Twophase'ini kullandılar ve bu sayede Rubik Küpünün her iki tarafını aynı anda döndürmek gibi özel yeteneklerden yararlanabildiler.
Grup ayrıca, Rubik Küpünün bir tarafını döndürmeye başlamadan önce, ona dik olan diğer tarafın dönüşünü tamamlamalarına olanak tanıyan bir teknik de kullandı. Bu yöntem önemli ölçüde zaman kazandırıyor, ancak zamanlama yanlışsa veya çok fazla kuvvet kullanılırsa Rubik Küpüne zarar verme veya hatta kırma riski taşıyor. Bu nedenle, öğrenciler Rubik Küpünü bu kuvvete dayanacak ve bu teknikle sorunsuz çalışacak şekilde daha da özelleştirmek zorunda kaldılar.
Dünya Rubik Küp Birliği (WCA) kurallarına göre, katılımcılar Rubik Küplerini özelleştirebilirler, ancak küpün standart bir küp gibi dönebilmesi ve işlev görebilmesi, her yüzünde 9 renkli kare ve 6 farklı renkte 6 yüz bulunması şartıyla. Oyuncular plastik dışında malzemeler kullanabilirler, ancak renkli bölümlerin aynı yüzey dokusuna sahip olması gerekir.
") |
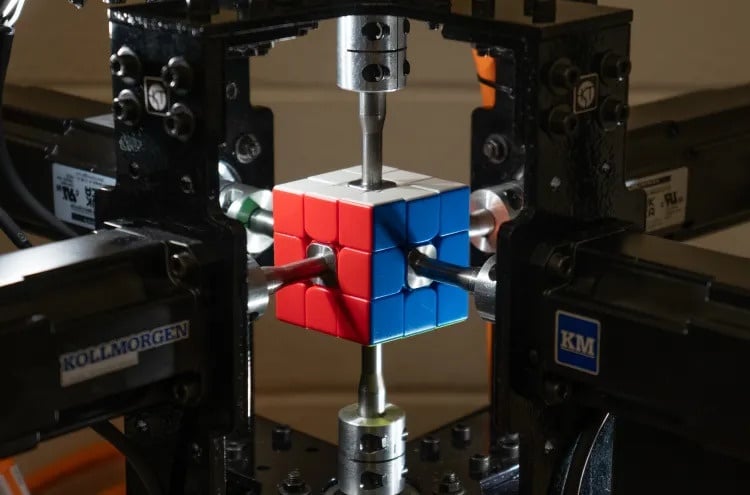
Bu türden altı motor, Rubik Küpü'nü döndürmekle görevli olarak kalan kenarlara da takılacak. Fotoğraf: Yazar tarafından sağlanmıştır. |
Dayanıklılığı artırmak için Purdue ekibi, Rubik Küpü'nün iç yapısını daha sağlam bir SLS naylon reçinesi kullanılarak özel olarak 3 boyutlu yazıcıda üretilmiş bir versiyonla geliştirdi. Artırılmış yağlama ve gerilim, aşırı dönmeyi azaltmaya ve kontrolü iyileştirmeye yardımcı olur.
Purdubik Küpü, Rubik Küpünün her yüzünün merkezinde bulunan metal şaftlara bağlı altı motor kullanır. Çeşitli yöntemlerle denemeler yaptıktan sonra, ekip robotun durduğunda her yüzü hassas bir şekilde hizalayabilmesi için yamuksal bir hareket sistemi kullanmayı tercih etti.
Patrohay, Rubik Küpü daha dayanıklı ve plastikten başka bir malzemeden yapılmış olsaydı Purdubik'in kendi rekorunu kırabileceğine inanıyor. "Tamamen karbon fiber kompozitten yapılmış özel bir Rubik Küpü üretilseydi, daha yüksek hızlara dayanabileceğini düşünüyorum. Bu da süreyi daha da kısaltmanıza olanak tanırdı," dedi.
Kaynak: https://znews.vn/ben-trong-robot-giai-rubik-nhanh-nhat-the-gioi-post1557575.html
![[Fotoğraf] Başbakan Pham Minh Chinh, Laos Eğitim ve Spor Bakanı Thongsalith Mangnormek'i kabul ediyor.](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765876834721_dsc-7519-jpg.webp&w=3840&q=75)
![[Resim] Vietnamlı kadın futbolcuların azimli mücadele ruhu](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F17%2F1765990260956_ndo_br_4224760955870434771-copy-jpg.webp&w=3840&q=75)
![[Resim] 2025 Topluluk Eylem Ödülleri galası öncesinde sızdırılan görüntüler.](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765882828720_ndo_br_thiet-ke-chua-co-ten-45-png.webp&w=3840&q=75)

![[Fotoğraf] Başbakan Pham Minh Chinh, Tochigi Eyaleti Valisi'ni kabul ediyor (Japonya)](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765892133176_dsc-8082-6425-jpg.webp&w=3840&q=75)
![[Canlı Yayın] 2025 Toplumsal Eylem Ödülleri Galası](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765899631650_ndo_tr_z7334013144784-9f9fe10a6d63584c85aff40f2957c250-jpg.webp&w=3840&q=75)

































































![[Canlı Yayın] "Etkileyici Vietnam Turizmi" Video/Klip Oluşturma Yarışması 2025 Kapanış Töreni ve Ödül Sunumu](https://vphoto.vietnam.vn/thumb/402x226/vietnam/resource/IMAGE/2025/12/17/1765974650260_z7273498850699-00d2fd6b0972cb39494cfa2559bf85ac-1765959338756946072104-627-0-1338-1138-crop-1765959347256801551121.jpeg)























Yorum (0)