
 |
छात्रों के एक समूह द्वारा बनाई गई रूबिक क्यूब सॉल्विंग मशीन ने विश्व रिकॉर्ड बनाया है। फोटो: टीम द्वारा प्रदान की गई । |
पर्ड्यू विश्वविद्यालय के छात्रों के एक समूह ने हाल ही में अपने द्वारा डिजाइन किए गए एक रोबोट के साथ गिनीज वर्ल्ड रिकॉर्ड बनाया है, जो केवल 0.103 सेकंड में रूबिक क्यूब को हल करने में सक्षम है। यह दूसरे रोबोट द्वारा बनाए गए पिछले रिकॉर्ड से तीन गुना तेज है।
इस रिकॉर्ड के पीछे कोई तेज़ गति वाला रोबोट नहीं था। छात्रों की टीम ने एक हाई-स्पीड लेकिन लो-रिज़ॉल्यूशन कैमरा सिस्टम, बढ़ी हुई मजबूती के लिए विशेष रूप से डिज़ाइन किया गया रूबिक क्यूब और स्पीड रूबिक क्यूब सॉल्वर्स के बीच लोकप्रिय एक विशेष तकनीक का संयोजन किया।
प्रतिस्पर्धियों की तुलना में प्रमुख अंतर।
रुबिक क्यूब को हल करने वाले रोबोट बनाने की होड़ 2014 में शुरू हुई, जब लेगो माइंडस्टॉर्म्स किट से निर्मित और सैमसंग गैलेक्सी एस4 फोन का उपयोग करने वाले एक रोबोट ने मात्र 3.253 सेकंड में रुबिक क्यूब को हल कर दिया। मई 2024 में, जापान की मित्सुबिशी इलेक्ट्रिक के इंजीनियरों ने 0.305 सेकंड में रुबिक क्यूब को हल करने वाले रोबोट के साथ विश्व रिकॉर्ड का दावा किया।
रोबोट द्वारा रुबिक क्यूब को हल करने का समय आधे सेकंड से भी कम करने के लिए, टीम ने लेगो घटकों का उपयोग बंद कर दिया और इसके बजाय औद्योगिक मोटरों जैसे अनुकूलित भागों का उपयोग किया। लेकिन 0.103 सेकंड का लक्ष्य हासिल करने के लिए, पर्ड्यू टीम ने उस गति को परिष्कृत किया जिस पर उनका रोबोट रुबिक क्यूब की हलचल को "देख" सकता था।
स्पीड रुबिक क्यूब सॉल्वर टाइमर शुरू होने से पहले ही क्यूब को देख सकते हैं। हालांकि, टाइमर में रोबोट द्वारा क्यूब के फलकों पर प्रत्येक रंगीन वर्ग की स्थिति की पहचान करने में लगने वाला समय भी शामिल होगा।
छात्रों के समूह ने रूबिक क्यूब के विपरीत कोनों पर केवल 720x540 पिक्सल रिज़ॉल्यूशन वाले फ्लिर के दो हाई-स्पीड मशीन विज़न कैमरों का उपयोग किया। प्रत्येक कैमरा केवल 10 माइक्रोसेकंड के एक ही शॉट में क्यूब के तीन फलकों का एक साथ अवलोकन कर सकता था।
") |
रोबोट की अत्यंत तीव्र रंग पहचान तकनीक। फोटो: लेखक द्वारा प्रदान की गई। |
परंपरागत कैमरों को सेंसर से डेटा संसाधित करने और उसे डिजिटल छवि में परिवर्तित करने में समय लगता है। हालांकि, छात्रों के समूह द्वारा निर्मित रोबोट, पुरदुबिक क्यूब, एक अनुकूलित छवि पहचान प्रणाली का उपयोग करता है जो इस छवि प्रसंस्करण चरण को पूरी तरह से छोड़ देता है।
यह सिस्टम प्रत्येक कैमरे द्वारा रिकॉर्ड किए गए फ्रेम के भीतर एक बहुत छोटे क्षेत्र (128x124 पिक्सल) पर केंद्रित होता है, जिससे संसाधित किए जाने वाले डेटा की मात्रा कम हो जाती है। सेंसर से प्राप्त कच्चा डेटा सीधे एक उच्च-गति रंग पहचान प्रणाली को भेजा जाता है, जो इससे भी छोटे नमूना क्षेत्रों से RGB मानों का उपयोग करके पारंपरिक और AI विधियों की तुलना में अधिक तेज़ी से रंग का निर्धारण करती है।
हालांकि यह विधि कम स्थिर है, फिर भी यह समूह की प्राथमिक आवश्यकता की पूर्ति सुनिश्चित कर सकती है। समूह के एक छात्र पैट्रोहे ने कहा, "अगर सटीकता केवल 90% भी हो, तो भी यह काफी है। हमें वास्तव में गति की आवश्यकता है।"
संपूर्ण सिस्टम को अनुकूलित करें।
पैट्रोहे का तर्क है कि पिछले प्रत्येक रिकॉर्ड तोड़ने वाले रोबोट ने आमतौर पर केवल एक उत्कृष्ट विशेषता में ही सुधार किया था। एमआईटी के छात्र दल द्वारा निर्मित रोबोट (2018) ने उच्च-प्रदर्शन वाले औद्योगिक हार्डवेयर के उपयोग पर ध्यान केंद्रित किया। मित्सुबिशी इलेक्ट्रिक टीम ने रूबिक क्यूब के प्रत्येक फलक को घुमाने के लिए अनुकूलित विशेष इलेक्ट्रिक मोटरों का चयन किया।
इस बीच, पर्ड्यू टीम ने कैमरे और इमेज प्रोसेसिंग से लेकर हार्डवेयर और सॉल्विंग एल्गोरिदम तक, पूरे सिस्टम को ऑप्टिमाइज़ करने के लिए आसानी से उपलब्ध सॉफ़्टवेयर का उपयोग किया। उन्होंने एलियास फ्रैंटर के रोब-टूफेज़ नामक एक रूबिक क्यूब सॉल्विंग एल्गोरिदम का इस्तेमाल किया, जिसे विशेष रूप से रोबोट के लिए डिज़ाइन किया गया था। इससे उन्हें रूबिक क्यूब के दोनों किनारों को एक साथ घुमाने जैसी विशेष क्षमताओं का लाभ उठाने में मदद मिली।
समूह ने एक ऐसी तकनीक का भी उपयोग किया जिससे वे रूबिक क्यूब के एक तरफ को घुमाना शुरू कर सकते हैं और फिर उसके लंबवत दूसरी तरफ को घुमाना पूरा कर सकते हैं। इस विधि से काफी समय बचता है, लेकिन अगर समय सही न हो या बहुत अधिक बल लगाया जाए तो रूबिक क्यूब को नुकसान पहुँचने या चकनाचूर होने का खतरा रहता है। इसलिए, छात्रों को रूबिक क्यूब को इस तरह से अनुकूलित करना पड़ा ताकि वह बल को सहन कर सके और इस तकनीक के साथ सुचारू रूप से काम कर सके।
वर्ल्ड रुबिक्स क्यूब एसोसिएशन (डब्ल्यूसीए) के नियमों के अनुसार, प्रतिभागी अपने रुबिक्स क्यूब को अपनी इच्छानुसार अनुकूलित कर सकते हैं, बशर्ते कि यह एक मानक क्यूब की तरह घूम सके और काम कर सके, जिसमें प्रत्येक फलक पर 9 रंगीन वर्ग हों और 6 फलक 6 अलग-अलग रंगों के हों। खिलाड़ी प्लास्टिक के अलावा अन्य सामग्रियों का उपयोग कर सकते हैं, लेकिन रंगीन भागों की सतह की बनावट एक जैसी होनी चाहिए।
") |
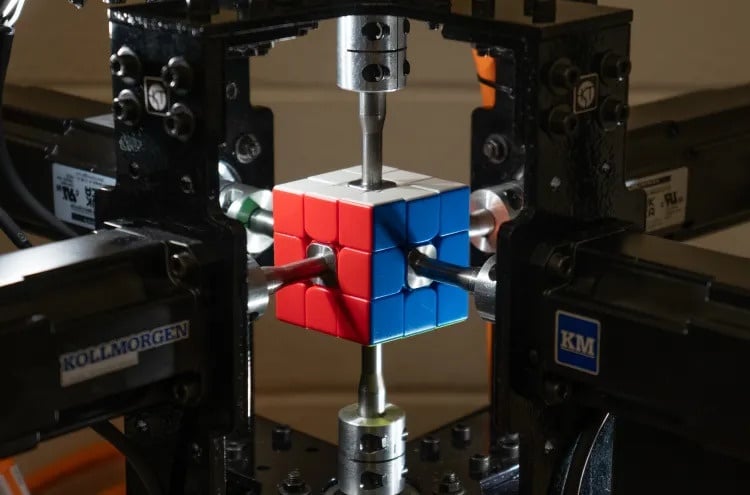
रुबिक क्यूब को घुमाने के लिए बाकी बचे किनारों पर इसी तरह की छह मोटरें लगाई जाएंगी। फोटो: लेखक द्वारा प्रदान की गई। |
मजबूती बढ़ाने के लिए, पर्ड्यू टीम ने रुबिक क्यूब की आंतरिक संरचना को एक विशेष 3D-प्रिंटेड संस्करण से उन्नत किया, जिसमें अधिक मजबूत SLS नायलॉन रेज़िन का उपयोग किया गया। बेहतर चिकनाई और तनाव एक साथ मिलकर अत्यधिक घूर्णन को कम करने और नियंत्रण को बेहतर बनाने में मदद करते हैं।
पुरदुबिक क्यूब में रुबिक क्यूब के प्रत्येक फलक के केंद्र में स्थित धातु के शाफ्ट से जुड़े छह मोटर का उपयोग किया जाता है। विभिन्न विधियों पर प्रयोग करने के बाद, टीम ने एक समलम्बाकार गति प्रणाली का उपयोग करने का निर्णय लिया ताकि रोबोट रुकने पर प्रत्येक फलक को सटीक रूप से संरेखित कर सके।
पैट्रोहे का मानना है कि अगर रूबिक क्यूब अधिक टिकाऊ होता और प्लास्टिक के अलावा किसी अन्य सामग्री से बना होता, तो पुरदुबिक अपना ही रिकॉर्ड तोड़ सकते थे। उन्होंने कहा, "अगर आप पूरी तरह से कार्बन फाइबर कंपोजिट से बना एक विशेष रूबिक क्यूब बनाते हैं, तो मुझे लगता है कि यह अधिक गति को सहन कर सकता है। इससे आप समय को और कम कर सकते हैं।"
स्रोत: https://znews.vn/ben-trong-robot-giai-rubik-nhanh-nhat-the-gioi-post1557575.html
![[फोटो] न्घे आन में पर्वत की ढलान पर स्थित मनमोहक प्राचीन गुलाब का बगीचा](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F19%2F1766109900916_vuon-hong-chin-do-thu-hut-du-khach-toi-check-in-o-ha-noi-3-20162778-1671624890024-1671624890104198100259.jpeg&w=3840&q=75)




![[फोटो] महासचिव तो लाम ने प्रदर्शनी स्थल का दौरा किया, जहां पुस्तकों, फोटो प्रदर्शनियों और पत्रकारिता में डिजिटल परिवर्तन की उपलब्धियों को प्रदर्शित किया गया है।](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F19%2F1766110879215_1766110240024-jpg.webp&w=3840&q=75)






























































































टिप्पणी (0)