
 |
Созданный группой студентов автомат для решения кубика Рубика установил мировой рекорд. Фото: Предоставлено командой . |
Группа студентов Университета Пердью недавно установила новый мировой рекорд Гиннесса с помощью робота собственной разработки, способного собрать кубик Рубика всего за 0,103 секунды. Это в три раза быстрее, чем предыдущий рекорд, установленный другим роботом.
За рекордом стоял не робот, который двигался быстрее. Команда студентов объединила высокоскоростную, но низкоразрешающую систему камер, специально разработанный кубик Рубика для повышения прочности и особую технику решения, популярную среди любителей скоростной сборки кубика Рубика.
Ключевые отличия от конкурентов.
Гонка за создание роботов, способных решать кубик Рубика, началась в 2014 году, когда робот, собранный из набора Lego Mindstorms и использующий телефон Samsung Galaxy S4, решил кубик Рубика всего за 3,253 секунды. В мае 2024 года инженеры японской компании Mitsubishi Electric установили мировой рекорд, создав робота, решившего кубик Рубика за 0,305 секунды.
Чтобы сократить время решения кубика Рубика роботом до менее чем половины секунды, команда отказалась от использования компонентов Lego и вместо этого применила оптимизированные детали, такие как промышленные двигатели. Но для достижения отметки в 0,103 секунды команда из Университета Пердью усовершенствовала скорость, с которой их робот мог «видеть» перемешивание кубика Рубика.
Участники скоростной игры в кубик Рубика могут наблюдать за кубиком до запуска таймера. Однако таймер также будет учитывать время, необходимое роботу для определения местоположения каждого цветного квадрата на гранях.
Группа студентов использовала две высокоскоростные камеры машинного зрения от компании Flir с разрешением всего 720x540 пикселей, расположенные в противоположных углах кубика Рубика. Каждая камера могла одновременно наблюдать за тремя гранями кубика в одном снимке, длительностью всего 10 микросекунд.
") |
Технология сверхбыстрого распознавания цвета, используемая роботом. Фото: Предоставлено автором. |
Обычным камерам по-прежнему требуется время для обработки данных с сенсора и преобразования их в цифровое изображение. Однако робот Purdubik's Cube, созданный студенческой группой, использует собственную систему распознавания изображений, которая полностью обходит этот этап обработки изображений.
Эта система фокусируется на очень небольшой области (128x124 пикселя) внутри кадра, который записывает каждая камера, что уменьшает объем данных, подлежащих обработке. Необработанные данные с датчиков передаются непосредственно в высокоскоростную систему определения цвета, которая использует значения RGB из еще меньших областей выборки для определения цвета быстрее, чем как традиционные методы, так и методы искусственного интеллекта.
Хотя этот метод менее стабилен, он может гарантировать выполнение основного требования группы. «Даже если точность составляет всего 90%, этого все равно достаточно. Нам действительно нужна скорость», — поделился Патрохай, студент из этой группы.
Оптимизировать всю систему.
Патрохай утверждает, что каждый предыдущий робот, устанавливавший рекорды, как правило, улучшал только одну выдающуюся характеристику. Робот, созданный студенческой командой MIT (2018), был ориентирован на использование высокопроизводительного промышленного оборудования. Команда Mitsubishi Electric выбрала специализированные электродвигатели, оптимизированные для вращения каждой грани кубика Рубика.
Тем временем команда из Университета Пердью выбрала доступное программное обеспечение для оптимизации всей системы, от камеры и обработки изображений до аппаратного обеспечения и алгоритмов решения. Они использовали Rob-Twophase Элиаса Франтара, алгоритм решения кубика Рубика, специально разработанный для роботов, что позволило им использовать такие специальные возможности, как одновременное вращение обеих сторон кубика Рубика.
Группа также использовала технику, позволяющую начать вращение одной стороны кубика Рубика до завершения вращения другой стороны, перпендикулярной ей. Этот метод значительно экономит время, но существует риск повреждения или даже разрушения кубика Рубика, если момент вращения выбран неправильно или приложена слишком большая сила. Поэтому студентам пришлось дополнительно модифицировать кубик Рубика, чтобы он выдерживал нагрузку и плавно работал при использовании этой техники.
Согласно правилам Всемирной ассоциации кубика Рубика (WCA), участники могут модифицировать свой кубик Рубика, при условии, что он по-прежнему может вращаться и функционировать как стандартный кубик, имея 9 цветных квадратов на каждой грани и 6 граней с 6 разными цветами. Игроки могут использовать материалы, отличные от пластика, но цветные секции должны иметь одинаковую текстуру поверхности.
") |
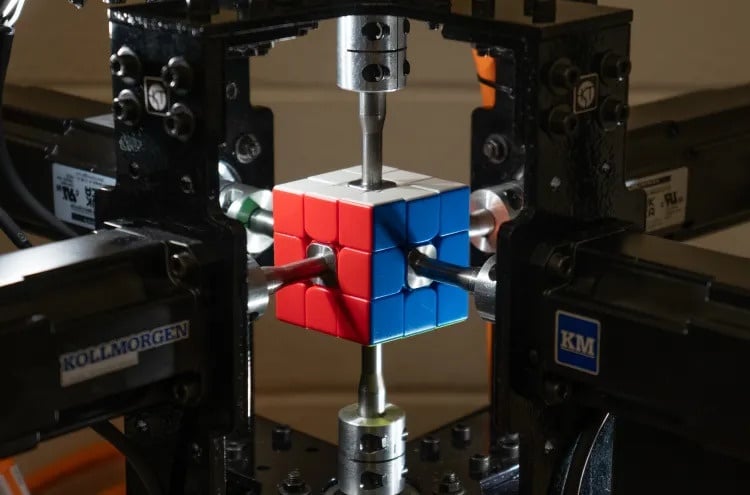
К оставшимся сторонам будут прикреплены шесть подобных двигателей, задача которых — вращать кубик Рубика. Фото: Предоставлено автором. |
Для повышения прочности команда из Университета Пердью модернизировала внутреннюю структуру кубика Рубика, создав специальную версию, напечатанную на 3D-принтере с использованием более прочной нейлоновой смолы SLS. Усиленная смазка и натяжение одновременно помогают уменьшить чрезмерное вращение и улучшить контроль.
В конструкции кубика Пурдубика используются шесть двигателей, прикрепленных к металлическим валам, расположенным в центре каждой грани кубика Рубика. После экспериментов с различными методами команда выбрала трапециевидную систему перемещения, чтобы робот мог точно выравнивать каждую грань в момент остановки.
Патрохай считает, что Пурдубик мог бы побить свой собственный рекорд, если бы кубик Рубика был более прочным и изготовлен из материала, отличного от пластика. «Если бы вы сделали специализированный кубик Рубика полностью из композитного материала на основе углеродного волокна, я думаю, он выдерживал бы более высокие скорости. Это позволило бы еще больше сократить время», — сказал он.
Источник: https://znews.vn/ben-trong-robot-giai-rubik-nhanh-nhat-the-gioi-post1557575.html
![[Фото] Премьер-министр Фам Минь Чинь принимает министра образования и спорта Лаоса Тонгсалит Мангнормек.](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765876834721_dsc-7519-jpg.webp&w=3840&q=75)
![[Изображение] Неукротимый боевой дух вьетнамских женских футбольных команд](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F17%2F1765990260956_ndo_br_4224760955870434771-copy-jpg.webp&w=3840&q=75)
![[Фото] Премьер-министр Фам Минь Чинь принимает губернатора провинции Тотиги (Япония)](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765892133176_dsc-8082-6425-jpg.webp&w=3840&q=75)
![[Прямая трансляция] Гала-церемония вручения наград за общественную деятельность 2025 года](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765899631650_ndo_tr_z7334013144784-9f9fe10a6d63584c85aff40f2957c250-jpg.webp&w=3840&q=75)
![[Изображение] Утекшие в сеть фотографии в преддверии гала-церемонии вручения премии Community Action Awards 2025.](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765882828720_ndo_br_thiet-ke-chua-co-ten-45-png.webp&w=3840&q=75)


































































![[Прямая трансляция] Церемония закрытия и вручение наград победителям конкурса видеороликов/клипов «Впечатляющий туризм во Вьетнаме 2025».](https://vphoto.vietnam.vn/thumb/402x226/vietnam/resource/IMAGE/2025/12/17/1765974650260_z7273498850699-00d2fd6b0972cb39494cfa2559bf85ac-1765959338756946072104-627-0-1338-1138-crop-1765959347256801551121.jpeg)
























Комментарий (0)