
호치민시 식품산업대학의 학생인 카오 꾸옥 칸은 공장에서 사용하거나 환자를 돕기 위해 기본적인 인간 팔 동작을 모방하는 로봇 팔을 만들었습니다.
이 로봇팔은 전기전자공학부 제어 및 자동화 공학 전공 4학년생인 칸(Khanh)이 작년 말에 제작했습니다. 이 로봇팔은 고온, 유독 가스가 있는 환경 등 실험실이나 공장 등 혹독한 환경에서 사람들이 작업을 수행하는 것을 돕기 위한 것이었습니다. 이 제품은 방 안에서 움직일 수 없는 장애인들을 도울 수 있으며, 음식과 음료의 배달을 제어하는 데에도 사용할 수 있습니다.
칸이 만든 로봇팔은 3D 프린팅 PLA(폴리락틱산) 플라스틱 소재로 만들어졌으며, 인간의 팔과 비슷한 뼈 모양을 가지고 있습니다.
Khanh은 PLA 플라스틱이 단단하고 내구성이 뛰어나며 저렴하여 팔을 더욱 견고하고 유연하게 움직일 수 있도록 도와준다고 말했습니다. 팔 내부에는 5개의 서보 모터가 배치되어 있으며, 손가락과 낚싯줄(낚싯줄로 사용)을 연결하고 있습니다. 이 낚싯줄은 크기는 작지만 200파운드(약 100kg) 이상의 힘을 견딜 수 있습니다. 이는 팔의 전체 움직임을 제어하는 "힘줄"로 간주됩니다.
사용자가 손을 움직이면 8메가픽셀 카메라가 이미지를 녹화하여 라즈베리 파이 신호 처리 보드로 전송하여 실제 외부 움직임에 따라 팔의 움직임을 제어합니다. 팔 내부에는 손가락의 그립력이 항상 유지되도록 돕는 텐셔너가 있어 모터 기어의 당기는 힘을 줄여 연속 작동 시 모터 과열을 방지합니다.
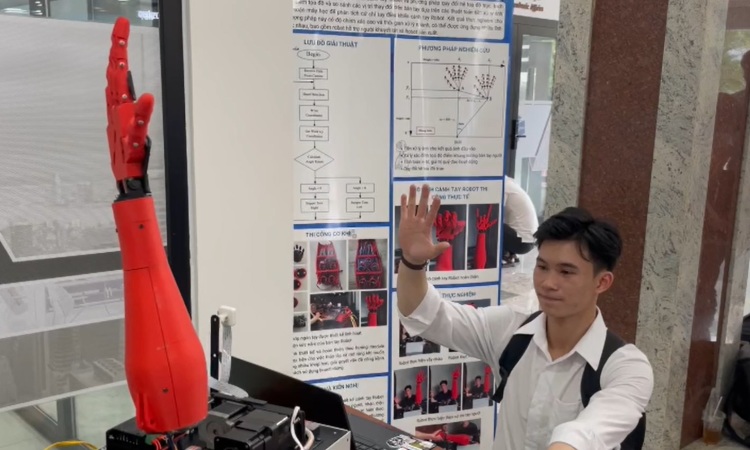
까오 꾸옥 칸이 제스처로 로봇 팔을 조종하는 것을 시험하고 있다. 영상 : 하 안
저자는 라즈베리 파이 보드를 사용하기 때문에 시스템이 지연되어 작동하며, 사용자가 신호를 보낸 후 손동작을 수행하는 데 약 1초가 걸린다고 설명했습니다. 이러한 단점을 보완하기 위해, Khanh은 명령에 더 잘 반응하는 보드를 완성하고 사용하는 데 시간이 걸리며, 이는 지연 시간을 줄이는 데 도움이 된다고 설명했습니다. 또한, 새로운 로봇 팔은 손가락 끝에서 팔꿈치까지의 움직임을 시뮬레이션하기 때문에 2D 좌표로만 작동합니다. 로봇 팔은 손가락에서 어깨까지 작동하도록 완성되어야 하는데, 팔이 3D 좌표로 움직일 때 더욱 복잡하고 사실적인 동작을 수행할 수 있기 때문입니다. Khanh은 첫 번째 제품의 향후 계획에 대해 "이 제품은 더 빠르고 민감하게 작동하기 위해 추가 연구가 필요합니다. 이 팔을 통해 인간과 상호 작용하는 완전한 로봇으로 발전할 수 있습니다."라고 말했습니다.
호치민시 식품산업대학교 전기전자학부 강사인 쩐 호안(Tran Hoan) 마스터는 이 연구가 이미지 처리를 활용하여 인공지능을 적용하는 연구 방향이며, 기존 센서를 대체하여 로봇 팔을 제어하는 현재의 방식을 대체할 수 있다고 평가했습니다. 학생들은 제품 제작 과정에서 기계 설계 기술과 마이크로컨트롤러 프로그래밍 경험을 모두 습득하게 되며, 이는 미래에 매우 유용하게 활용될 것입니다.
하지만 호안 씨는 이 제품의 이동 반경이 제한적이어서 팔이 360도 회전할 수 있도록 모터를 더 개발하여 더욱 유연하게 만들어야 한다고 말했습니다. "이를 위해서는 학생들이 더 작은 모터를 사용하는 방법을 연구하고, 전자 부품을 수용할 수 있는 충분한 공간을 확보하도록 팔을 재설계해야 합니다."

로봇팔은 6월 3일 호치민시 식품산업대학교 학생 과학 연구 경진대회에서 소개되었습니다. 사진: 하안
전기전자 전문가인 쯔엉 꽝 빈 부교수는 이 알고리즘을 사용하여 골격과 손 동작을 인식하는 제품은 새로운 것이 아니며, 실시간 처리 속도도 아직 상당히 느리다고 말했습니다. 그는 로봇이 실시간으로 물체를 잡을 수 있도록 필요한 속도를 달성하기 위해 이미지 처리 및 손 골격 인식 결과를 제공할 수 있도록 알고리즘을 최적화하고 하드웨어 시스템을 업그레이드해야 한다고 제안했습니다.
칸의 제품은 6월 3일 호치민시 식품산업대학교 과학기술부가 주최한 2022-2023학년도 학생 과학 연구 대회에서 장려상을 수상했습니다.
하안
[광고_2]
소스 링크




































































































댓글 (0)