
Det är den senaste bedriften för Italienska tekniska institutet (IIT) med iRonCub3 – världens första humanoida robot som kan flyga med en jetturbin. Produkten markerar en vändpunkt i forskningen om terrängrobotar, särskilt i samband med räddningsuppdrag och katastrofinsatser som i allt högre grad kräver stöd från avancerad teknik.
iRonCub3 är utrustad med fyra jetmotorer, varav två på armarna och två på baksidan, vilka kan generera en dragkraft på mer än 1 000 newton, tillräckligt för att lyfta robotens 70 kg tunga kropp från marken. Titanryggraden och det värmebeständiga skalet skyddar roboten från avgaser upp till 800 °C, vilket garanterar säkerheten under drift.

iRonCub3 – den första humanoida roboten som flög på ett jetplan – lyckades lyfta. Foto: Youtube Artificiell och mekanisk intelligens
Till skillnad från drönare som är symmetriska och stabila, orsakar robotar med humanoida former och flexibla lemmar aerodynamiska fluktuationer och ändrar ständigt sin tyngdpunkt. För att hantera denna utmaning utvecklade IIT-teamet, i samarbete med Polytechnic School of Milan och Stanford University, ett AI-baserat flygkontrollsystem med hjälp av neurala nätverk tränade på simulering och verkliga data. Detta gör det möjligt för iRonCub3 att justera sin flyginställning, hantera turbulent luftflöde och sekventiellt avfyra sina jetplan under start.
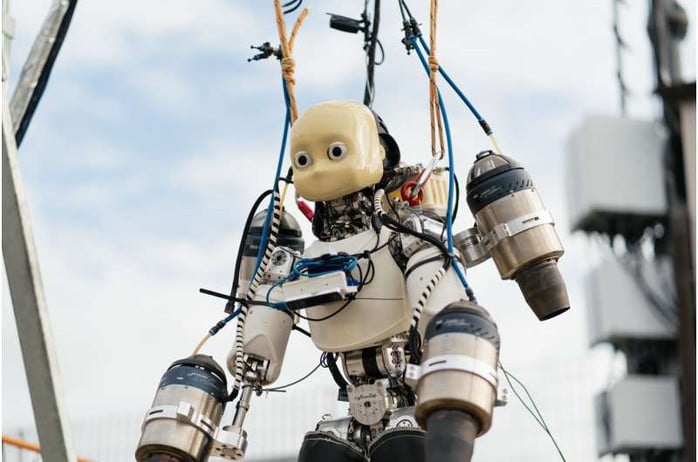
iRonCub3 integrerar fyra jetmotorer, inklusive två motorer monterade på armarna och två motorer på baksidan. Foto: IIT
Utvecklingen av denna robot tillämpade även "co-design"-metoden, samtidigt som karossformen och motorns monteringsposition optimerades för att uppnå högsta flygprestanda. En serie simuleringstester, termisk styrning, dragkraftssensorer och start- och landningsalgoritmer förfinades noggrant.
Enligt Daniele Pucci, chef för laboratoriet för mekanisk och artificiell intelligens (AMI Lab) vid IIT, syftar robotens design till att utöka dess operativa kapacitet i tuffare och mer oförutsägbara miljöer. iRonCub kan användas i katastrofhjälpsuppdrag, kartläggning av farliga miljöer och autonom navigering i slutna utrymmen med komplexa strukturer.
Det förväntas att iRonCub3 inom en snar framtid kommer att fortsätta testas utomhus på Genuas flygplats, som förberedelse för ytterligare steg i att integrera flygande robotteknik i verkligheten.
Källa: https://nld.com.vn/robot-hinh-nguoi-biet-bay-dau-tien-tren-the-gioi-196250621224223724.htm

![[Foto] Lam Dong: Närbild av illegal sjö med trasig vägg](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/11/03/1762166057849_a5018a8dcbd5478b1ec4-jpg.webp)
![[Foto] Höstmässan 2025 och imponerande rekord](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/11/03/1762180761230_ndo_br_tk-hcmt-15-jpg.webp)
![[Foto] Premiärminister Pham Minh Chinh tar emot ordföranden för Japan-Vietnam-vänskapsföreningen i Kansai-regionen.](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/11/03/1762176259003_ndo_br_dsc-9224-jpg.webp)
![[Foto] Generalsekreterare To Lam tar emot Singapores ambassadör Jaya Ratnam](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/11/03/1762171461424_a1-bnd-5309-9100-jpg.webp)








































































































Kommentar (0)