
RT อ้างคำประกาศของ Roscosmos เมื่อวันที่ 20 สิงหาคม ตามเวลามอสโก ซึ่งยืนยันว่ายานอวกาศ Luna-25 ตกบนพื้นผิวดวงจันทร์หลังจากสูญเสียการควบคุมขณะเตรียมลงจอด
“ตามการวิเคราะห์เบื้องต้น ยานอวกาศ Luna-25 ได้เคลื่อนที่ไปยังวงโคจรที่ไม่ได้กำหนดไว้ และหยุดทำงานหลังจากชนกับพื้นผิวดวงจันทร์” Roscosmos กล่าวในแถลงการณ์

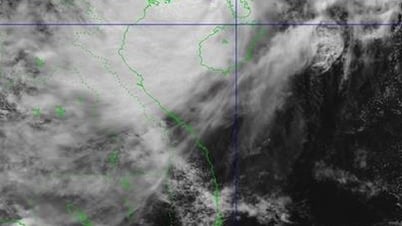
ภาพที่ส่งกลับมาจาก Luna-25 ในระหว่างเที่ยวบินไปยังดวงจันทร์ (ภาพ: Roscosmos)
Roscosmos อธิบายเพิ่มเติมว่า ขณะควบคุม Luna-25 เพื่อเข้าสู่วงโคจรเพื่อเตรียมลงจอด เมื่อเวลา 14:10 น. ของวันที่ 19 สิงหาคม ตามเวลามอสโก เรือได้ประสบกับสถานการณ์ฉุกเฉินกะทันหัน ซึ่งทำให้ไม่สามารถปฏิบัติการตามพารามิเตอร์ที่สถานีภาคพื้นดินควบคุมได้
จากนั้น Roscosmos พยายามที่จะติดต่อ Luna-25 อีกครั้งในวันที่ 19 และ 20 สิงหาคม แต่ไม่สำเร็จ
หน่วยงานอวกาศของรัฐบาลกลางรัสเซียกล่าวว่าจะมีการจัดตั้งคณะกรรมาธิการที่เกี่ยวข้องซึ่งประกอบด้วยตัวแทนจากหน่วยงานต่างๆ หลายแห่งเพื่อพิจารณาสาเหตุของความล้มเหลวของภารกิจ Luna-25
ยานลูนา 25 ถูกปล่อยขึ้นสู่อวกาศจากฐานปล่อยอวกาศวอสตอชนี คอสโมโดรม ในเขตอามูร์ ของรัสเซีย ด้วยจรวดโซยุซ-2 เฟรแกต เมื่อวันที่ 10 สิงหาคมที่ผ่านมา โดยเป็นการเริ่มต้นการเดินทางที่รวดเร็วสู่ดวงจันทร์ วิถีโคจรของยานลูนา 25 จะทำให้ยานสามารถแซงยานลงจอดจันทรายาน-3 ของอินเดีย ซึ่งถูกปล่อยขึ้นสู่อวกาศเมื่อกลางเดือนกรกฎาคมที่ผ่านมาได้ โจนาธาน แมคดาวเวลล์ นักวิจัยจากศูนย์ฟิสิกส์ดาราศาสตร์ฮาร์วาร์ด-สมิธโซเนียน ระบุว่า ข้อมูลที่สื่อต่างๆ รายงานว่ารัสเซียและอินเดียกำลังเร่งพัฒนาโครงการเพื่อไปให้ถึงขั้วโลกใต้ของดวงจันทร์นั้นไม่ถูกต้อง เนื่องจากโครงการทั้งสองอยู่ระหว่างการพัฒนามานานกว่าทศวรรษแล้ว
การนำยานอวกาศลงจอดบนดวงจันทร์อย่างปลอดภัยถือเป็นก้าวสำคัญสำหรับโครงการอวกาศของรัสเซีย ยานลูนา 25 จะเป็นการวางรากฐานสำหรับภารกิจ สำรวจ ดวงจันทร์ด้วยหุ่นยนต์ในอนาคตของ Roscosmos ภารกิจลูนาบางภารกิจจะใช้การออกแบบยานอวกาศแบบเดียวกัน
ยานลูน่า 25 บรรทุกอุปกรณ์ วิทยาศาสตร์ 8 ชนิด หากสามารถกลับมาใช้งานได้อีกครั้งหลังเกิดอุบัติเหตุ ลูน่า-25 จะใช้เครื่องมือเหล่านั้นเพื่อค้นหาน้ำแข็งและสำรวจบริเวณขั้วโลกของดวงจันทร์ ซึ่งไม่เคยมียานลงจอดหรือยานสำรวจมาก่อน
ตรา คานห์ (ที่มา: Russian.rt.com)
แหล่งที่มา





















![[ภาพ] ประธานรัฐสภา Tran Thanh Man เยี่ยมเยียนมารดา Ta Thi Tran วีรบุรุษชาวเวียดนาม](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/7/20/765c0bd057dd44ad83ab89fe0255b783)




































































การแสดงความคิดเห็น (0)