
RT citovala oznámení Roskosmosu z 20. srpna moskevského času, které potvrzuje, že sonda Luna-25 narazila do povrchu Měsíce poté, co ztratila kontrolu při přípravě na přistání.
„Podle předběžné analýzy se sonda Luna-25 přesunula na neurčenou oběžnou dráhu a po srážce s měsíčním povrchem přestala fungovat,“ uvedl Roskosmos ve svém prohlášení.

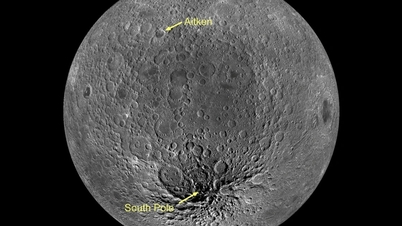
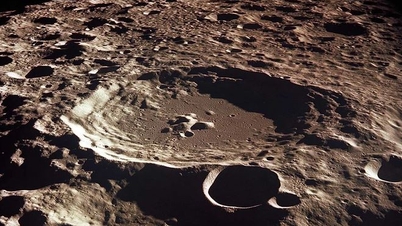
Snímky odeslané z Luny-25 během jejího letu k Měsíci. (Foto: Roscosmos)
Roskosmos dále vysvětlil, že během řízení Luny-25 pro vstup na oběžnou dráhu a přípravu na přistání se sonda 19. srpna ve 14:10 moskevského času náhle setkala s nouzovou situací, která jí zabránila provádět operace podle parametrů řízených pozemní stanicí.
Roskosmos se poté 19. a 20. srpna pokusil obnovit kontakt s Lunou-25, ale neuspěl.
Ruská federální kosmická agentura uvedla, že bude vytvořena komise složená ze zástupců několika agentur, která bude zjišťovat příčiny neúspěchu mise Luna-25.
Sonda Luna 25 odstartovala 10. srpna z kosmodromu Vostočnyj v ruské Amurské oblasti na raketě Sojuz-2 Fregat a zahájila tak svou rychlou cestu k Měsíci. Trajektorie sondy Luna 25 jí umožní předjet indický přistávací modul Čandraján-3, který byl vypuštěn v polovině července. Podle Jonathana McDowella, výzkumníka z Harvard-Smithsonova centra pro astrofyziku, jsou zprávy médií o tom, že Rusko a Indie závodí v dosažení jižního pólu Měsíce, nepřesné, protože oba projekty se vyvíjejí již více než deset let.
Bezpečné přistání kosmické lodi na Měsíci by bylo obrovským krokem vpřed pro ruský vesmírný program. Luna 25 by také položila základy pro budoucí robotické mise Roskosmosu k průzkumu Měsíce, z nichž některé budou používat stejnou konstrukci kosmické lodi.
Luna 25 nese osm různých vědeckých přístrojů. Pokud se ji podaří znovu aktivovat, Luna-25 je využije k hledání vodního ledu a k prozkoumání polárních oblastí Měsíce, kde dosud nebyl proveden přistávací modul ani rover.
Tra Khanh (zdroj: russian.rt.com)
Zdroj
![[Fotografie] Lidská láska v povodni v Hue](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/10/29/1761740905727_4125427122470875256-2-jpg.webp)
![[Foto] Hue: Uvnitř kuchyně, která denně daruje tisíce jídel lidem v zaplavených oblastech](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/10/29/1761738508516_bepcomhue-jpg.webp)



![[Foto] Premiér Pham Minh Chinh předsedal schůzi, na které se hodnotilo fungování dvouúrovňového modelu místní samosprávy.](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/10/29/1761751710674_dsc-7999-jpg.webp)


































































![[Živý] Koncert Ha Long 2025: „Heritage Spirit – Rozjasnění budoucnosti“](https://vphoto.vietnam.vn/thumb/402x226/vietnam/resource/IMAGE/2025/10/29/1761743605124_g-anh-sang-am-thanh-hoanh-trang-cua-chuong-trinh-mang-den-trai-nghiem-dang-nho-cho-du-khach-22450328-17617424836781829598445-93-0-733-1024-crop-1761742492749383512980.jpeg)






















Komentář (0)