
Ez az Olasz Műszaki Intézet (IIT) legújabb eredménye az iRonCub3-mal – a világ első humanoid robotjával, amely képes sugárhajtású turbinával repülni. A termék fordulópontot jelent a több terepen repülni képes robotok kutatásában, különösen a mentőakciók és a katasztrófaelhárítás kontextusában, amelyek egyre inkább igénylik a fejlett technológia támogatását.
Az iRonCub3 négy sugárhajtóművel van felszerelve, kettő a karokon és kettő a hátulján, amelyek több mint 1000 newton tolóerőt képesek létrehozni, ami elegendő ahhoz, hogy a robot 70 kg súlyú testét felemelje a talajtól. A titán gerinc és a hőálló héj védi a robotot az akár 800°C-os kipufogógázoktól, biztosítva a biztonságot működés közben.

Az iRonCub3 – az első humanoid robot, amely sugárhajtású repülőgépen repült – sikeresen felszállt. Fotó: Youtube Mesterséges és mechanikus intelligencia
A szimmetrikus és stabil drónokkal ellentétben a humanoid alakú és rugalmas végtagokkal rendelkező robotok aerodinamikai ingadozásokat okoznak, és folyamatosan változtatják a súlypontjukat. Ennek a kihívásnak a megoldására az IIT csapata a Milánói Műszaki Iskolával és a Stanford Egyetemmel együttműködve egy mesterséges intelligencia alapú repülésirányító rendszert fejlesztett ki, amely szimuláción és valós adatokon betanított neurális hálózatokat használ. Ez lehetővé teszi az iRonCub3 számára, hogy beállítsa repülési magasságát, megbirkózzon a turbulens légáramlással, és felszállás közben szekvenciálisan indítsa el a fúvókáit.
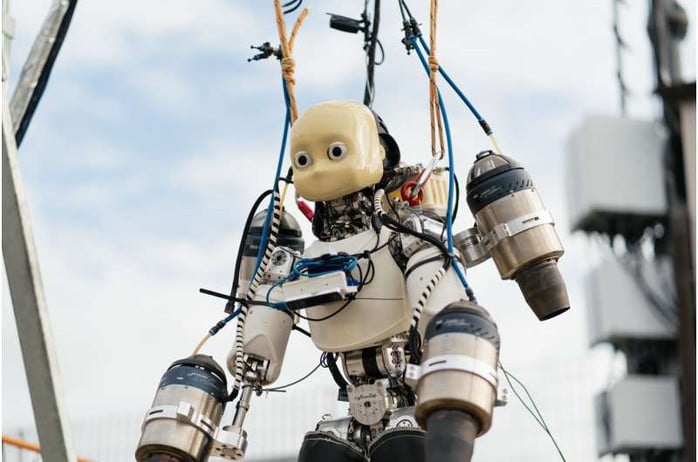
Az iRonCub3 4 sugárhajtóművet tartalmaz, ebből 2 a karokra, 2 pedig a hátuljára van felszerelve. Fotó: IIT
Ennek a robotnak a fejlesztése során is az „együtttervezés” módszerét alkalmazták, miközben optimalizálták a test alakját és a motor beszerelési helyzetét a legmagasabb repülési teljesítmény elérése érdekében. Szimulációs tesztek sorozatát, hőszabályozást, tolóerő-érzékelőket, valamint felszállási és leszállási algoritmusokat gondosan finomítottak.
Daniele Pucci, az IIT Mechanikai és Mesterséges Intelligencia Laboratóriumának (AMI Lab) vezetője szerint a robot tervezésének célja a működési képességeinek bővítése zordabb és kiszámíthatatlanabb környezetekben. Az iRonCub katasztrófaelhárítási missziókban, veszélyes környezetek felmérésében és összetett szerkezetű zárt terekben történő autonóm navigációban is használható.
A várakozások szerint a közeljövőben az iRonCub3 tesztelése a szabadban folytatódik a genovai repülőtéren, előkészítve a repülő robottechnológia valós életbe való integrálásának további lépéseit.
Forrás: https://nld.com.vn/robot-hinh-nguoi-biet-bay-dau-tien-tren-the-gioi-196250621224223724.htm
![[Fotó] Pham Minh Chinh miniszterelnök részt vesz az 5. országos sajtódíjátadó ünnepségen, amely a korrupció, a pazarlás és a negativitás megelőzéséről és leküzdéséről szól.](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/10/31/1761881588160_dsc-8359-jpg.webp)


![[Fotó] Da Nang: A vízszint fokozatosan visszahúzódik, a helyi hatóságok kihasználják a takarítást](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/10/31/1761897188943_ndo_tr_2-jpg.webp)














![[INFOGRAFIKA] Leica M EV1, Az első Leica M fényképezőgép elektronikus keresővel](https://vphoto.vietnam.vn/thumb/402x226/vietnam/resource/IMAGE/2025/10/31/1761917597071_thumb-leica-m-ev1-jpg.webp)














































































Hozzászólás (0)