
ໂດຍໄດ້ຮັບແຮງບັນດານໃຈຈາກຄວາມສາມາດຂອງແມວໃນການຫັນ ແລະ ລົງຈອດ, ທີມວິໄຈຂອງສະຖາບັນເທັກໂນໂລຍີ Harbin (ຈີນ) ໄດ້ໃຊ້ການຮຽນຮູ້ເສີມ (RL) - ປະເພດຂອງປັນຍາປະດິດ (AI) - ເພື່ອຝຶກຫຸ່ນຍົນເພື່ອປັບທ່າທາງໃນອາກາດເມື່ອໂດດຂ້າມໜ້າດິນທີ່ມີແຮງໂນ້ມຖ່ວງຕໍ່າລົງເທິງດາວເຄາະນ້ອຍ.

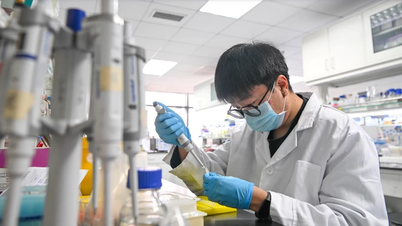
ທີມວິໄຈຈີນໄດ້ຝຶກຊ້ອມຫຸ່ນຍົນສີ່ຂາເພື່ອປັບທ່າທາງ ແລະລົງຈອດຄືກັບແມວເພື່ອເຄື່ອນທີ່ໜ້າດິນຂອງດາວເຄາະນ້ອຍ. (ພາບ: SCMP)
ບໍ່ເຫມືອນກັບລະບົບແບບດັ້ງເດີມທີ່ອີງໃສ່ຮາດແວຮັກສາສະຖຽນລະພາບແບບພິເສດແຕ່ຢ່າງຫນັກ, ຫຸ່ນຍົນໃຊ້ລະບົບການຄວບຄຸມ "ແບບບໍ່ມີຕົວແບບ" ເພື່ອເລື່ອນສີ່ຂາຂອງຕົນໃນການເຄື່ອນໄຫວປະສານງານ. ນີ້ເຮັດໃຫ້ຫຸ່ນຍົນສາມາດປັບຄວາມອຽງແລະທິດທາງໃຫມ່ໃນການເດີນທາງໃນກາງອາກາດ, ນັກຄົ້ນຄວ້າລາຍງານໃນ Journal of Astronauttics.
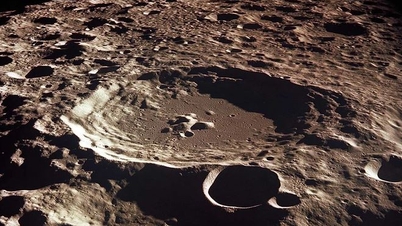
ການຄົ້ນຄວ້າດັ່ງກ່າວໄດ້ແກ້ໄຂສິ່ງທ້າທາຍທີ່ສຳຄັນດ້ວຍການໂດດຫຸ່ນຍົນເມື່ອເຄື່ອນທີ່ເທິງດາວເຄາະນ້ອຍ, ບ່ອນທີ່ສະພາບແວດລ້ອມມີແຮງໂນ້ມຖ່ວງຕໍ່າ ແລະ ຄວາມສົມດຸນຂອງກຳລັງຂາກໍ່ອາດເຮັດໃຫ້ຫຸ່ນຍົນໝຸນໄດ້ໂດຍບໍ່ສາມາດຄວບຄຸມໄດ້, ລົງຈອດບໍ່ສຳເລັດ ຫຼື ກະໂດດອອກຈາກພື້ນຜິວທັງໝົດ.
"ໃນສະພາບແວດລ້ອມທີ່ມີແຮງໂນ້ມຖ່ວງຂອງດາວເຄາະນ້ອຍ, ຫຸ່ນຍົນປະສົບກັບໄລຍະເວລາທີ່ຍາວນານຂອງການຫຼຸດລົງໃນແຕ່ລະຄັ້ງ. ມັນເປັນສິ່ງສໍາຄັນທີ່ຈະໃຊ້ເວລານີ້ເພື່ອປັບການເຫນັງຕີງທີ່ເກີດຈາກການໂດດ, ເພື່ອຮັບປະກັນການລົງຈອດທີ່ປອດໄພຫຼືປ່ຽນມຸມຫມຸນເພື່ອປັບທິດທາງຂອງການເຄື່ອນໄຫວ," ທີມງານກ່າວໃນບົດລາຍງານ.
ທີມງານກ່າວຕື່ມ ວ່າ "ແພລະຕະຟອມການຈໍາລອງ microgravity ໄດ້ຖືກອອກແບບແລະສ້າງຂື້ນເພື່ອກວດສອບປະສິດທິພາບຂອງວິທີການໂດດນີ້ໂດຍຜ່ານການທົດລອງໃນຕົ້ນແບບຫຸ່ນຍົນ quadruped," ທີມງານກ່າວຕື່ມວ່າ.
ດາວເຄາະນ້ອຍແມ່ນສິ່ງເສດເຫຼືອຂອງການສ້າງລະບົບສຸລິຍະ ແລະຖືເປັນກຸນແຈເພື່ອຖອດລະຫັດຕົ້ນກຳເນີດຂອງມັນ. ພວກມັນຍັງອຸດົມສົມບູນໄປດ້ວຍຊັບພະຍາກອນເຊັ່ນ: platinum ແລະໂລຫະທີ່ຫາຍາກອື່ນໆ, ເຊິ່ງສາມາດຊ່ວຍການຂຸດຄົ້ນອາວະກາດໃນອະນາຄົດແລະການນໍາໃຊ້ອຸດສາຫະກໍາ.
ສິ່ງທ້າທາຍຢູ່ດ້ານເປັນຮູບດາວ
ມາຮອດປະຈຸບັນ, ອົງການອະວະກາດໃນຢູໂຣບ, ຍີ່ປຸ່ນ ແລະ ອາເມລິກາ ໄດ້ສຳເລັດການລົງຈອດຍານອາວະກາດເທິງດາວເຄາະນ້ອຍເພື່ອເກັບເອົາຕົວຢ່າງ, ແຕ່ຍັງບໍ່ທັນມີນັກບິນທີ່ມີຄວາມສາມາດໃນການສຳຫຼວດໜ້າດິນໃນໄລຍະຍາວ.
ຍານສຳຫຼວດລໍ້ແບບດັ້ງເດີມ, ຄືກັບທີ່ໃຊ້ຢູ່ເທິງດວງຈັນ ແລະດາວອັງຄານ, ປະເຊີນກັບສິ່ງທ້າທາຍໃນສະພາບແວດລ້ອມເປັນຮູບດາວ ເນື່ອງຈາກແຮງໂນ້ມຖ່ວງທີ່ອ່ອນເພຍ, ໂດຍທົ່ວໄປແລ້ວພຽງແຕ່ສອງສາມພັນໜ່ວຍຂອງໂລກ, ບໍ່ໄດ້ສະໜອງແຮງດຶງທີ່ພຽງພໍສຳລັບລໍ້ໃຫ້ເຄື່ອນໄຫວຢ່າງມີປະສິດທິພາບ.
ເພື່ອແກ້ໄຂຂໍ້ຈໍາກັດເຫຼົ່ານີ້, ນັກວິທະຍາສາດ ໄດ້ສະເຫນີໃຫ້ໃຊ້ຫຸ່ນຍົນໂດດສໍາລັບພາລະກິດໃນອະນາຄົດ, ແຕ່ວ່າການນໍາສະເຫນີສິ່ງທ້າທາຍໃຫມ່.
ແຕ່ລະຄັ້ງທີ່ມັນໂດດ, ຫຸ່ນຍົນຈະຢູ່ໃນອາກາດປະມານ 10 ວິນາທີ ຫຼືດົນກວ່ານັ້ນ, ດົນພໍສໍາລັບກຳລັງຂາທີ່ບໍ່ສົມດຸນ ເຮັດໃຫ້ຫຸ່ນຍົນໝຸນວຽນແບບຄວບຄຸມບໍ່ໄດ້ ຫຼືແມ້ແຕ່ກະດ້າງຈາກພື້ນຜິວ ແລະລອຍຂຶ້ນສູ່ອາວະກາດ.
ທີມງານ Harbin ໃຊ້ RL ເພື່ອຝຶກອົບຮົມຫຸ່ນຍົນໃນການຈໍາລອງ virtual. ໃນໄລຍະເຈັດຊົ່ວໂມງ, AI ໄດ້ຮຽນຮູ້ຈາກຄວາມຜິດພາດຂອງການທົດລອງຂອງມັນແລະປັບປຸງການເຄື່ອນໄຫວຂອງມັນໄປສູ່ພື້ນທີ່ຢ່າງຫມັ້ນຄົງ. ລະບົບ AI ຂອງຫຸ່ນຍົນໄດ້ສະແດງໃຫ້ເຫັນຄວາມສາມາດໃນການປັບທິດທາງຂອງມັນ, ລວມທັງ pitch (ເອື່ອຍໄປຂ້າງຫນ້າຫຼືກັບຄືນໄປບ່ອນ), tilt (ເອື່ອຍໄປຂ້າງ), ແລະ yaw (ມຸມຫມຸນ), ໃນເວລາພຽງແຕ່ສອງສາມວິນາທີ.
ສໍາລັບຕົວຢ່າງ, ເມື່ອເປີດຕົວໄປທາງຫນ້າໃນທ່າອຽງຂະຫນາດໃຫຍ່ເຖິງ 140 ອົງສາ, ຫຸ່ນຍົນສາມາດສະຖຽນລະພາບທ່າທາງພາຍໃນ 8 ວິນາທີ. ມັນຍັງສາມາດຫມຸນໃນກາງອາກາດໄດ້ເຖິງ 90 ອົງສາເພື່ອປ່ຽນທິດທາງຂອງການເຄື່ອນໄຫວ.

ຫຸ່ນຍົນໄດ້ຮັບການຝຶກອົບຮົມໂດຍໃຊ້ວິທີການຮຽນເສີມ. (ພາບ: SCMP)
ເພື່ອກວດສອບປະສິດທິພາບຂອງລະບົບ, ນັກຄົ້ນຄວ້າໄດ້ສ້າງເວທີການຈໍາລອງ microgravity ທີ່ອະນຸຍາດໃຫ້ຫຸ່ນຍົນ "ລອຍ" ໃນດ້ານເກືອບ frictionless.
ທີມງານກ່າວວ່າເຖິງແມ່ນວ່າຈໍາກັດການເຄື່ອນໄຫວສອງມິຕິລະດັບ, ການທົດລອງໄດ້ຢືນຢັນປະສິດທິພາບຂອງລະບົບແລະຜົນໄດ້ຮັບການເສີມສ້າງຈາກການຈໍາລອງ, ທີມງານກ່າວວ່າ.
ນອກຈາກນັ້ນ, ນັກວິທະຍາສາດພົບວ່າຂະບວນການດັ່ງກ່າວຕ້ອງການພະລັງງານຄອມພິວເຕີ້ຫນ້ອຍຫຼາຍຈາກຫຸ່ນຍົນ. ການອອກແບບທີ່ມີນ້ໍາຫນັກເບົາແລະປະຫຍັດພະລັງງານຂອງລະບົບເຮັດໃຫ້ມັນເຫມາະສົມໂດຍສະເພາະສໍາລັບພາລະກິດການຂຸດຄົ້ນໃນອາວະກາດເລິກ.
ໃນອະນາຄົດ, ລະບົບນີ້ສາມາດມີຄໍາຮ້ອງສະຫມັກຢ່າງກວ້າງຂວາງ, ຈາກ ການສໍາຫຼວດ ວິທະຍາສາດຈົນເຖິງການຂຸດຄົ້ນຊັບພະຍາກອນໃນຮູບດາວ. ແນວໃດກໍ່ຕາມ, ທີມວິໄຈກ່າວວ່າຈໍາເປັນຕ້ອງມີການຄົ້ນຄວ້າເພີ່ມເຕີມເພື່ອປັບປຸງຄວາມສາມາດຂອງ AI ໃນການປັບຕົວເຂົ້າກັບພູມສັນຖານແລະສະພາບແວດລ້ອມທີ່ຫຼາກຫຼາຍ.
ທີ່ມາ


![[ຮູບພາບ] ຕອນເຊົ້າວັນທີ 1/10 ຢູ່ ຮ່າໂນ້ຍ: ນ້ຳຖ້ວມໄດ້ແກ່ຍາວ, ປະຊາຊົນໄປເຮັດວຽກ](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/10/1/189be28938e3493fa26b2938efa2059e)






























![[ຮູບພາບ] ທ່ານປະທານປະເທດ ເຈືອງເຕີນຊາງ ຕ້ອນຮັບທ່ານປະທານສະພາແຫ່ງຊາດ ກູບາ Esteban Lazo Hernandez](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/9/30/4d38932911c24f6ea1936252bd5427fa)
![[ຮູບພາບ] ກອງປະຊຸມໃຫຍ່ຄັ້ງທີ 1 ຂອງອົງການພັກແຂວງ ຟູທໍ້ ສົກປີ 2025-2030](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/9/30/1507da06216649bba8a1ce6251816820)
![[ຮູບພາບ] ພາໂນຣາມາຂອງຂົວທີ່ພັກສາຍເຄເບີນ, ເປັນຂອດສຸດທ້າຍຂອງທາງດ່ວນ Ben Luc-Long Thanh](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/9/30/391fdf21025541d6b2f092e49a17243f)























































(0)