
W USA roboty MiniBug i WaterStrider mają odpowiednio 8,5 mm i 22 mm długości i mogą poruszać się z prędkością około 6 mm na sekundę.
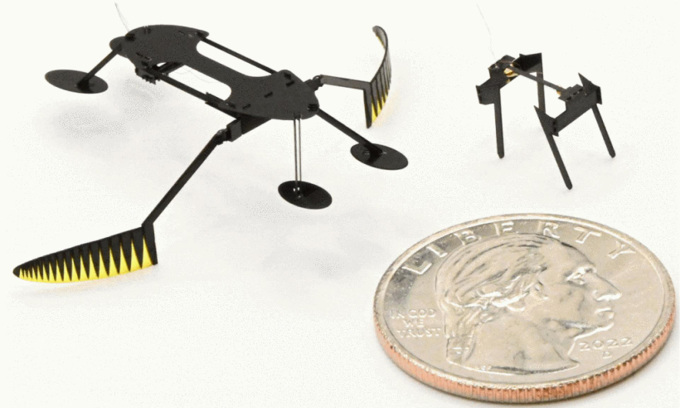
Robot WaterStrider i MiniBug obok monety. Zdjęcie: Bob Hubner/WSU
Zespół badawczy z Uniwersytetu Stanowego Waszyngtonu opracował dwa roboty przypominające owady o nazwach MiniBug i WaterStrider, poinformował TechXplore 18 stycznia. Są to najmniejsze, najlżejsze i najszybsze roboty tego typu. W przyszłości te mikroroboty będą mogły być wykorzystywane do różnych zadań, takich jak sztuczne zapylanie, poszukiwania i ratownictwo, monitorowanie środowiska, mikromanufaktura czy chirurgia.
MiniBug ma 8,5 mm długości i waży 8 miligramów, a WaterStrider ma 22 mm długości i waży 55 miligramów. Oba mogą poruszać się z prędkością około 6 mm na sekundę. Choć nadal wolniej niż naturalne owady, to prędkość ta jest już wysoka dla mikrorobotów o podobnej wielkości, jak twierdzi Conor Trygstad, student studiów podyplomowych na Wydziale Inżynierii Materiałowej i Mechaniki oraz główny autor badania. Mrówka o masie 5 miligramów może poruszać się z prędkością prawie metra na sekundę.
Kluczowym elementem tych robotów jest maleńki siłownik, który umożliwia im poruszanie się. Trygstad wykorzystuje nowatorską technikę produkcji, aby zmniejszyć siłownik do mniej niż jednego miligrama – najmniejszego, jaki kiedykolwiek stworzono. „To najmniejsze i najszybsze siłowniki, jakie kiedykolwiek opracowano dla mikrorobotów” – powiedział Néstor O. Pérez-Arancibia, ekspert z Wydziału Inżynierii Materiałowej i Mechaniki Uniwersytetu Stanowego w Waszyngtonie.
Siłownik wykorzystuje stop z pamięcią kształtu, który może zmieniać kształt pod wpływem ciepła. Materiał ten nazywany jest „pamięcią kształtu”, ponieważ zapamiętuje swój kształt i może następnie powrócić do pierwotnej formy. W przeciwieństwie do konwencjonalnych silników stosowanych w robotach, stopy te nie posiadają ruchomych ani obracających się części.
Stopy z pamięcią kształtu zazwyczaj nie są stosowane w robotach o dużych ruchach, ponieważ są zbyt wolne. Jednak w MiniBug i WaterStrider siłowniki są wykonane z dwóch drutów ze stopu z pamięcią kształtu o średnicy zaledwie 0,025 mm. Za pomocą niewielkiego prądu elektrycznego druty można łatwo nagrzewać i schładzać, umożliwiając robotowi poruszanie płetwami lub nogami z prędkością do 40 razy na sekundę. Wstępne testy wykazały również, że siłowniki były w stanie podnosić obiekty o masie ponad 150 razy większej od ich własnej.
Thu Thao (według TechXplore )
Link źródłowy





![[Zdjęcie] Sekretarz generalny i prezes To Lam przewodniczy spotkaniu, na którym zatwierdzany jest projekt raportu dotyczącego wyników drugiej kontroli przeprowadzonej przez Biuro Polityczne Stałego Komitetu Partii Miasta Hanoi.](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2026/05/26/1779789811432_a2-bnd-4430-9620-jpg.webp)















![[GALERIA] Baterie AA USB-C robią furorę, bo są bardzo wygodne dla entuzjastów technologii.](https://vphoto.vietnam.vn/thumb/402x226/vietnam/resource/IMAGE/2026/05/26/1779798818575_p-png.webp)























































































Komentarz (0)