
 |
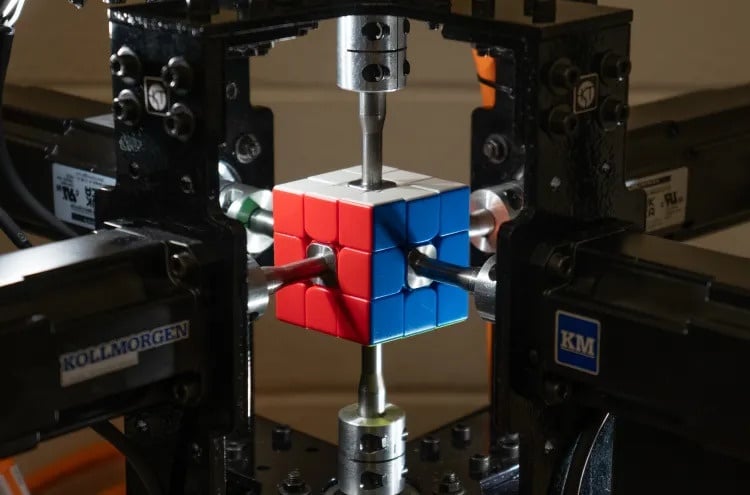
เครื่องแก้รูบิกที่ทำลายสถิติ โลก ของกลุ่มนักเรียน ภาพ: NVCC |
กลุ่มนักศึกษามหาวิทยาลัยเพอร์ดูเพิ่งสร้างสถิติโลกใหม่ด้วยหุ่นยนต์ที่พวกเขาออกแบบเอง โดยแก้ลูกบาศก์รูบิกได้ภายในเวลาเพียง 0.103 วินาที ซึ่งเร็วกว่าสถิติเดิมของหุ่นยนต์อีกตัวที่ทำไว้ถึงสามเท่า
สถิตินี้ไม่ได้เกิดขึ้นจากหุ่นยนต์ที่เคลื่อนที่เร็วกว่า นักศึกษาได้ผสมผสานระบบกล้องความเร็วสูงแต่ความละเอียดต่ำ ลูกบาศก์รูบิกที่ปรับแต่งให้ทนทาน และเทคนิคการแก้โจทย์พิเศษที่ได้รับความนิยมในหมู่ผู้เชี่ยวชาญด้านการแก้โจทย์ความเร็ว
ความแตกต่างที่สำคัญจากคู่แข่ง
การแข่งขันสร้างหุ่นยนต์แก้รูบิกเริ่มต้นขึ้นในปี 2014 เมื่อหุ่นยนต์ที่สร้างจากชุดเลโก้ Mindstorms และใช้โทรศัพท์ Samsung Galaxy S4 แก้รูบิกได้ภายในเวลาเพียง 3.253 วินาที ในเดือนพฤษภาคม 2024 วิศวกรของมิตซูบิชิ อิเล็คทริค ในประเทศญี่ปุ่นอ้างว่าตนทำลายสถิติโลกด้วยหุ่นยนต์แก้รูบิกได้ภายใน 0.305 วินาที
เพื่อลดเวลาของหุ่นยนต์ให้เหลือต่ำกว่าครึ่งวินาที ทีมจึงเลิกใช้ชิ้นส่วนเลโก้ แล้วใช้ชิ้นส่วนที่ปรับแต่งมาอย่างดี เช่น มอเตอร์อุตสาหกรรม แต่เพื่อให้ถึง 0.103 วินาที ทีม Purdue จึงปรับความเร็วที่หุ่นยนต์สามารถ "มองเห็น" การสับเปลี่ยนของลูกบาศก์รูบิก
ตัวแก้โจทย์ความเร็วสามารถสังเกตลูกบาศก์ได้ก่อนที่ตัวจับเวลาจะเริ่มทำงาน อย่างไรก็ตาม ตัวจับเวลาจะคำนึงถึงเวลาที่หุ่นยนต์ใช้ในการระบุตำแหน่งของสี่เหลี่ยมสีแต่ละอันบนหน้าด้วย
นักเรียนใช้กล้องแมชชีนวิชัน Flir ความเร็วสูงสองตัว ความละเอียดเพียง 720x540 พิกเซล ติดตั้งอยู่ที่มุมตรงข้ามของลูกบาศก์ กล้องแต่ละตัวสามารถสังเกตหน้าของลูกบาศก์ได้สามด้านพร้อมกันในการถ่ายภาพครั้งเดียว ใช้เวลาเพียง 10 ไมโครวินาที
 |
เทคโนโลยีการจดจำสีที่รวดเร็วเป็นพิเศษของหุ่นยนต์ ภาพ: NVCC |
กล้องทั่วไปยังคงต้องใช้เวลาในการประมวลผลข้อมูลจากเซ็นเซอร์และแปลงข้อมูลเป็นภาพดิจิทัล อย่างไรก็ตาม คิวบ์ของเพอร์ดูบิก ซึ่งเป็นชื่อหุ่นยนต์ของนักเรียน ใช้ระบบจดจำภาพแบบกำหนดเองที่ข้ามขั้นตอนการประมวลผลภาพไปโดยสิ้นเชิง
ระบบจะมุ่งเน้นไปที่พื้นที่ขนาดเล็กมาก (128x124 พิกเซล) ในเฟรมที่กล้องแต่ละตัวจับภาพได้ ช่วยลดปริมาณข้อมูลที่ต้องประมวลผล ข้อมูลดิบจากเซ็นเซอร์จะถูกส่งไปยังระบบตรวจจับสีความเร็วสูงโดยตรง ซึ่งใช้ค่า RGB จากพื้นที่ตัวอย่างที่เล็กกว่า เพื่อระบุสีได้เร็วกว่าทั้งวิธีการทั่วไปและ AI
วิธีนี้แม้จะไม่เสถียรนัก แต่ก็สามารถตอบสนองความต้องการหลักของทีมได้ “ถึงแม้จะมีความแม่นยำเพียง 90% ก็ถือว่าเพียงพอแล้ว สิ่งที่เราต้องการจริงๆ คือความเร็ว” แพทโรเฮย์ นักศึกษาในกลุ่มกล่าว
เพิ่มประสิทธิภาพทั้งระบบ
Patrohay กล่าวว่าหุ่นยนต์ที่ทำลายสถิติในอดีตแต่ละตัวมักจะพัฒนาในองค์ประกอบที่โดดเด่นเพียงจุดเดียว หุ่นยนต์ของทีมนักศึกษา MIT (2018) มุ่งเน้นไปที่การใช้ฮาร์ดแวร์อุตสาหกรรมประสิทธิภาพสูง ทีม Mitsubishi Electric เลือกมอเตอร์ไฟฟ้าชนิดพิเศษที่ออกแบบมาเพื่อเพิ่มประสิทธิภาพการหมุนของหน้าลูกบาศก์รูบิกแต่ละอัน
ในขณะเดียวกัน ทีมงานของมหาวิทยาลัยเพอร์ดูได้เลือกใช้ซอฟต์แวร์สำเร็จรูปเพื่อปรับแต่งระบบทั้งหมดให้เหมาะสมที่สุด ตั้งแต่กล้อง การประมวลผลภาพ ฮาร์ดแวร์ ไปจนถึงอัลกอริทึมการแก้ปัญหา พวกเขาใช้ Rob-Twophase ของ Elias Frantar ซึ่งเป็นอัลกอริทึมการแก้ปัญหาลูกบาศก์รูบิกสำหรับหุ่นยนต์โดยเฉพาะ ซึ่งช่วยให้หุ่นยนต์สามารถใช้ประโยชน์จากความสามารถพิเศษต่างๆ เช่น การหมุนหน้ารูบิกสองหน้าพร้อมกันได้
ทีมวิจัยยังได้ใช้เทคนิคที่ทำให้พวกเขาเริ่มหมุนลูกบาศก์ด้านหนึ่งก่อนหมุนอีกด้านหนึ่งให้ตั้งฉากกับมัน วิธีนี้ช่วยประหยัดเวลาได้มาก แต่ก็มีความเสี่ยงที่จะทำให้ลูกบาศก์เสียหายหรือแตกได้หากจังหวะไม่ถูกต้องหรือใช้แรงมากเกินไป ดังนั้น นักศึกษาจึงต้องปรับแต่งลูกบาศก์ให้ทนต่อแรงและทำงานได้อย่างราบรื่นด้วยเทคนิคนี้
ตามกฎของสมาคมรูบิกโลก (WCA) ผู้เข้าร่วมสามารถปรับแต่งลูกบาศก์รูบิกของตนเองได้ ตราบใดที่ลูกบาศก์ยังคงหมุนได้และทำหน้าที่เป็นลูกบาศก์มาตรฐาน โดยแต่ละด้านประกอบด้วยสี่เหลี่ยมสี 9 ช่อง และอีก 6 ด้านมี 6 สี ผู้เล่นสามารถใช้วัสดุอื่นที่ไม่ใช่พลาสติกได้ แต่ส่วนที่มีสีต้องมีพื้นผิวสัมผัสเดียวกัน
 |
มอเตอร์ 6 ตัวนี้จะติดอยู่กับด้านที่เหลือ ทำหน้าที่หมุนลูกบาศก์รูบิก ภาพ: NVCC |
เพื่อเพิ่มความทนทาน ทีมงาน Purdue ได้ปรับปรุงโครงสร้างภายในของลูกบาศก์ด้วยการพิมพ์ 3 มิติแบบพิเศษ ซึ่งทำจากเรซินไนลอน SLS ที่แข็งแกร่งกว่า การหล่อลื่นและแรงดึงที่เพิ่มขึ้นยังช่วยลดการโอเวอร์ชูตและเพิ่มประสิทธิภาพการควบคุมอีกด้วย
ลูกบาศก์ของ Purdubik ใช้มอเตอร์หกตัวที่ติดอยู่กับเพลาโลหะซึ่งมีจุดศูนย์กลางอยู่ที่แต่ละด้านของลูกบาศก์ หลังจากทดสอบวิธีการต่างๆ หลายวิธี ทีมงานได้เลือกใช้ระบบการเคลื่อนที่แบบสี่เหลี่ยมคางหมูที่ช่วยให้หุ่นยนต์สามารถจัดตำแหน่งแต่ละด้านได้อย่างแม่นยำเมื่อหยุด
Patrohay เชื่อว่า Purdubik น่าจะทำลายสถิติของตัวเองได้ หากลูกบาศก์ทำจากวัสดุที่ทนทานกว่าพลาสติก “ถ้าคุณสร้างลูกบาศก์เฉพาะที่ทำจากคาร์บอนไฟเบอร์คอมโพสิตทั้งหมด ผมคิดว่ามันน่าจะรองรับความเร็วที่สูงกว่าได้ คุณน่าจะลดเวลาลงได้” เขากล่าว
ที่มา: https://znews.vn/ben-trong-robot-giai-rubik-nhanh-nhat-the-gioi-post1557575.html





![[ภาพถ่าย] ค้นพบประสบการณ์สุดพิเศษในเทศกาลวัฒนธรรมโลกครั้งแรก](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/10/11/1760198064937_le-hoi-van-hoa-4199-3623-jpg.webp)



















![[ภาพ] เลขาธิการพรรคร่วมขบวนแห่ฉลองครบรอบ 80 ปี การก่อตั้งพรรคแรงงานเกาหลี](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/10/11/1760150039564_vna-potal-tong-bi-thu-du-le-duyet-binh-ky-niem-80-nam-thanh-lap-dang-lao-dong-trieu-tien-8331994-jpg.webp)

































































การแสดงความคิดเห็น (0)