
 |
Машина для складання кубика Рубіка, створена групою студентів, встановила світовий рекорд. Фото: Надано командою . |
Група студентів Університету Пердью нещодавно встановила новий світовий рекорд Гіннеса за допомогою робота, якого вони самі розробили, здатного зібрати кубик Рубіка всього за 0,103 секунди. Це втричі швидше за попередній рекорд, встановлений іншим роботом.
За рекордом стояв не робот, який рухався швидше. Студентська команда поєднала високошвидкісну систему камер з низькою роздільною здатністю, спеціально розроблений кубик Рубіка для підвищеної міцності та спеціальну техніку складання, популярну серед швидкісних розв'язувачів кубика Рубіка.
Ключові відмінності порівняно з конкурентами.
Перегони зі створення роботів, які збирають кубик Рубіка, розпочалися у 2014 році, коли робот, зібраний з набору Lego Mindstorms за допомогою телефону Samsung Galaxy S4, зібрав кубик Рубіка всього за 3,253 секунди. У травні 2024 року інженери компанії Mitsubishi Electric у Японії встановили світовий рекорд, зібравши кубик Рубіка за 0,305 секунди.
Щоб скоротити час складання кубика Рубіка роботом до менш ніж півсекунди, команда відмовилася від використання компонентів Lego та натомість застосувала оптимізовані деталі, такі як промислові двигуни. Але щоб досягти позначки 0,103 секунди, команда Purdue удосконалила швидкість, з якою їхній робот міг «бачити» переміщення кубика Рубіка.
Гравці, які збирають кубик Рубіка на швидкість, можуть спостерігати за кубиком до запуску таймера. Однак, таймер також враховуватиме час, необхідний роботу для визначення розташування кожного кольорового квадрата на гранях.
Група студентів використовувала дві високошвидкісні камери машинного зору від Flir з роздільною здатністю лише 720x540 пікселів, розміщені на протилежних кутах кубика Рубіка. Кожна камера могла одночасно спостерігати три грані кубика в одному кадрі тривалістю лише 10 мікросекунд.
") |
Надзвичайно швидка технологія розпізнавання кольорів робота. Фото: Надано автором. |
Звичайним камерам все ще потрібен час для обробки даних із датчика та перетворення їх на цифрове зображення. Однак, робот Purdubik's Cube, створений студентською групою, використовує спеціальну систему розпізнавання зображень, яка повністю обходить цей етап обробки зображення.
Ця система фокусується на дуже малій області (128x124 пікселів) у кадрі, який записує кожна камера, зменшуючи обсяг даних, які потрібно обробляти. Необроблені дані з датчиків надсилаються безпосередньо до високошвидкісної системи визначення кольору, яка використовує значення RGB з ще менших областей вибірки для швидшого визначення кольору, ніж за допомогою традиційних методів та методів штучного інтелекту.
Хоча цей метод менш стабільний, він може забезпечити виконання основної вимоги групи. «Навіть якщо точність становить лише 90%, цього все одно достатньо. Що нам справді потрібно, так це швидкість», – поділився Патрохай, студент групи.
Оптимізуйте всю систему.
Патрохай стверджує, що кожен попередній робот-рекордсмен зазвичай покращував лише одну видатну функцію. Робот, розроблений студентською командою Массачусетського технологічного інституту (2018), був зосереджений на використанні високопродуктивного промислового обладнання. Команда Mitsubishi Electric обрала спеціалізовані електродвигуни, оптимізовані для обертання кожної грані кубика Рубіка.
Тим часом команда Purdue обрала легкодоступне програмне забезпечення для оптимізації всієї системи, від камери та обробки зображень до апаратного забезпечення та алгоритмів розв'язання. Вони використали Rob-Twophase Еліаса Франтара, алгоритм розв'язання кубика Рубіка, спеціально розроблений для роботів, що дозволяє їм використовувати спеціальні можливості, такі як одночасне обертання обох сторін кубика Рубіка.
Група також використала техніку, яка дозволяє їм почати обертати одну сторону кубика Рубіка, перш ніж завершити обертання іншої сторони перпендикулярно до неї. Цей метод значно економить час, але він ризикує пошкодити або навіть розбити кубик Рубіка, якщо неправильно вибрати момент або застосувати занадто велику силу. Тому студентам довелося додатково налаштувати кубик Рубіка, щоб він витримував силу та працював безперебійно за допомогою цієї техніки.
Згідно з правилами Всесвітньої асоціації кубика Рубіка (WCA), учасники можуть налаштовувати свій кубик Рубіка, якщо він все ще може обертатися та функціонувати як стандартний кубик, з 9 кольоровими квадратами на кожній грані та 6 гранями з 6 різними кольорами. Гравці можуть використовувати матеріали, відмінні від пластику, але кольорові секції повинні мати однакову текстуру поверхні.
") |
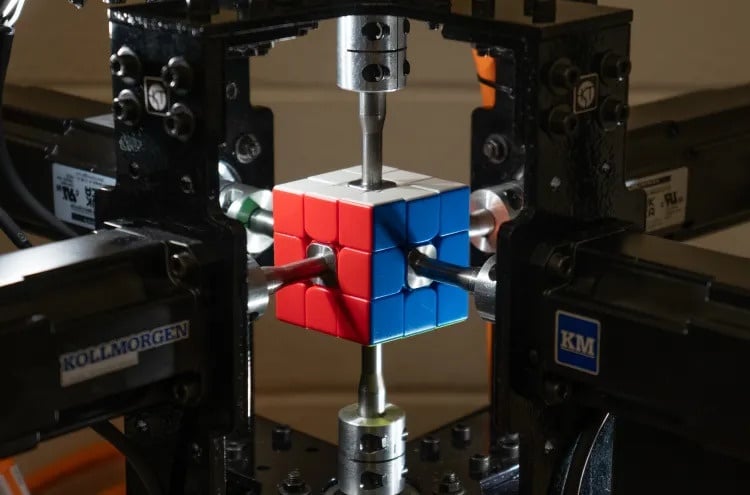
Шість таких двигунів будуть прикріплені до решти боків, завданням яких буде обертання кубика Рубіка. Фото: Надано автором. |
Щоб підвищити довговічність, команда Purdue модернізувала внутрішню структуру кубика Рубіка, створивши спеціальну версію, надруковану на 3D-принтері, з використанням міцнішої нейлонової смоли SLS. Посилене змащування та натяг одночасно допомагають зменшити надмірне обертання та покращити контроль.
Кубик Пурдубіка використовує шість двигунів, прикріплених до металевих валів, розташованих у центрі кожної грані кубика Рубіка. Після експериментів з різними методами команда вирішила використовувати трапецієподібну систему руху, щоб робот міг точно вирівняти кожну грань після зупинки.
Патрохай вважає, що Пурдюбік міг би побити власний рекорд, якби кубик Рубіка був міцнішим і виготовленим з матеріалу, відмінного від пластику. «Якби ви зробили спеціалізований кубик Рубіка повністю з вуглецевого волокнистого композиту, я думаю, він би витримував вищі швидкості. Це дозволило б вам ще більше скоротити час», – сказав він.
Джерело: https://znews.vn/ben-trong-robot-giai-rubik-nhanh-nhat-the-gioi-post1557575.html

![[Зображення] Незламний бойовий дух в'єтнамських жіночих футболістів](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F17%2F1765990260956_ndo_br_4224760955870434771-copy-jpg.webp&w=3840&q=75)
![[Фото] Прем'єр-міністр Фам Мінь Чінь приймає міністра освіти та спорту Лаосу Тонгсаліта Мангнормека](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765876834721_dsc-7519-jpg.webp&w=3840&q=75)
![[Зображення] Злиті зображення напередодні урочистої церемонії нагородження Community Action Awards 2025 року.](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765882828720_ndo_br_thiet-ke-chua-co-ten-45-png.webp&w=3840&q=75)
![[Фото] Прем'єр-міністр Фам Мінь Чінь приймає губернатора провінції Точіґі (Японія)](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765892133176_dsc-8082-6425-jpg.webp&w=3840&q=75)
![[Жива трансляція] Церемонія нагородження громадських дій 2025 року](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765899631650_ndo_tr_z7334013144784-9f9fe10a6d63584c85aff40f2957c250-jpg.webp&w=3840&q=75)

































































![[Пряма трансляція] Церемонія закриття та вручення нагород конкурсу відео/кліпів «Вражаючий туризм у В'єтнамі» 2025 року](https://vphoto.vietnam.vn/thumb/402x226/vietnam/resource/IMAGE/2025/12/17/1765974650260_z7273498850699-00d2fd6b0972cb39494cfa2559bf85ac-1765959338756946072104-627-0-1338-1138-crop-1765959347256801551121.jpeg)























Коментар (0)