
Cao Quoc Khanh นักศึกษาจากมหาวิทยาลัยอุตสาหกรรมอาหารนครโฮจิมินห์ ได้สร้างแขนหุ่นยนต์ที่เลียนแบบการเคลื่อนไหวแขนพื้นฐานของมนุษย์ เพื่อใช้ในโรงงานและช่วยเหลือผู้ป่วย
แขนหุ่นยนต์นี้สร้างขึ้นโดย Khanh นักศึกษาชั้นปีสุดท้ายสาขาวิชาวิศวกรรมควบคุมและระบบอัตโนมัติ คณะวิศวกรรมไฟฟ้าและอิเล็กทรอนิกส์ เมื่อปลายปีที่แล้ว โดยมีเป้าหมายเพื่อช่วยเหลือผู้คนในการทำงานในสภาพแวดล้อมที่รุนแรง เช่น พื้นที่ที่มีอุณหภูมิสูง พื้นที่ที่มีก๊าซพิษ... ในห้องปฏิบัติการหรือโรงงาน ผลิตภัณฑ์นี้ยังช่วยเหลือผู้พิการที่ไม่สามารถเคลื่อนไหวไปมาในห้องของตนเองได้อีกด้วย พวกเขาสามารถใช้แขนหุ่นยนต์เพื่อควบคุมการจัดส่งอาหารและเครื่องดื่ม
แขนหุ่นยนต์ที่สร้างขึ้นโดย Khanh มีรูปร่างคล้ายกระดูกคล้ายกับแขนของมนุษย์ ทำจากวัสดุพลาสติก PLA (Polylactic Acid) ที่พิมพ์แบบ 3 มิติ
Khanh กล่าวว่าพลาสติก PLA มีลักษณะแข็ง ทนทาน และราคาถูก ช่วยให้แขนเคลื่อนไหวได้มั่นคงและยืดหยุ่นมากขึ้น ภายในแขนมีการจัดวางมอเตอร์เซอร์โว 5 ตัวเพื่อเชื่อมต่อนิ้วเข้ากับระบบสายเบ็ด (ที่ใช้เป็นสายเบ็ด) ที่มีขนาดเล็กแต่สามารถรับแรงได้มากกว่า 200 ปอนด์ หรือเทียบเท่ากับเกือบ 100 กิโลกรัม ซึ่งถือเป็น "เอ็น" ที่ควบคุมการเคลื่อนไหวทั้งหมดของแขน
เมื่อผู้ใช้ขยับมือ กล้องความละเอียด 8 ล้านพิกเซลจะบันทึกภาพและส่งไปยังบอร์ดประมวลผลสัญญาณ Raspberry Pi เพื่อควบคุมการเคลื่อนไหวของแขนให้สอดคล้องกับการเคลื่อนไหวจริงภายนอก ภายในแขนยังมีตัวปรับความตึงที่ช่วยยืดแรงจับจากนิ้วให้เสมอ ช่วยลดแรงดึงจากเฟืองมอเตอร์ หลีกเลี่ยงกรณีที่มอเตอร์ร้อนเกินไปเมื่อใช้งานอย่างต่อเนื่อง
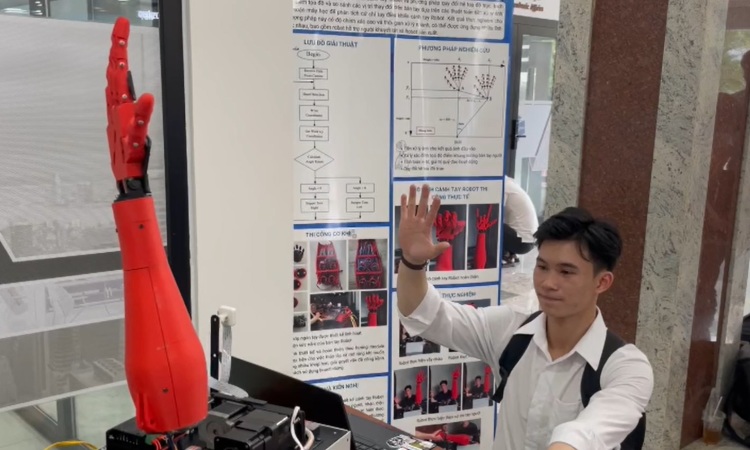
Cao Quoc Khanh ทดสอบการควบคุมแขนหุ่นยนต์ด้วยท่าทาง วิดีโอ : Ha An
ผู้เขียนกล่าวว่าเนื่องจากการใช้บอร์ด Raspberry Pi ระบบจึงทำงานด้วยความล่าช้า โดยใช้เวลาประมาณ 1 วินาทีในการแสดงท่าทางมือหลังจากผู้ใช้ส่งสัญญาณ เพื่อจำกัดข้อเสียเปรียบนี้ Khanh กล่าวว่าต้องใช้เวลาในการสร้างและใช้บอร์ดที่ตอบสนองต่อคำสั่งได้ดีขึ้น ซึ่งช่วยลดความล่าช้าได้ นอกจากนี้ แขนหุ่นยนต์ใหม่จำลองการเคลื่อนไหวจากปลายนิ้วไปยังข้อศอก ดังนั้นจึงทำงานบนพิกัด 2 มิติเท่านั้น แขนหุ่นยนต์จำเป็นต้องสร้างให้เสร็จเพื่อควบคุมจากนิ้วไปยังไหล่ เนื่องจากเมื่อแขนเคลื่อนที่บนพิกัด 3 มิติ จะสามารถเคลื่อนไหวที่ซับซ้อนและสมจริงมากขึ้นได้ “ผลิตภัณฑ์นี้ต้องมีการวิจัยเพิ่มเติมเพื่อให้ทำงานได้เร็วขึ้นและไวต่อความรู้สึกมากขึ้น จากแขนนี้ มันสามารถพัฒนาเป็นหุ่นยนต์ที่สมบูรณ์ซึ่งสามารถโต้ตอบกับมนุษย์ได้” Khanh กล่าวถึงความตั้งใจในอนาคตของผลิตภัณฑ์ตัวแรกของเขา
อาจารย์ Tran Hoan อาจารย์คณะไฟฟ้าและอิเล็กทรอนิกส์ มหาวิทยาลัยอุตสาหกรรมอาหารนครโฮจิมินห์ ประเมินว่านี่คือแนวทางการวิจัยที่ใช้การประมวลผลภาพเพื่อประยุกต์ใช้ปัญญาประดิษฐ์ ซึ่งสามารถทดแทนการใช้เซ็นเซอร์แบบเดิมในการควบคุมแขนหุ่นยนต์ในปัจจุบันได้ เมื่อผลิตสินค้า นักศึกษาจะได้รับทั้งทักษะการออกแบบเชิงกลและประสบการณ์ในการเขียนโปรแกรมไมโครคอนโทรลเลอร์ ซึ่งมีประโยชน์อย่างมากในอนาคต
อย่างไรก็ตาม นายโฮอัน กล่าวว่า ผลิตภัณฑ์มีรัศมีการเคลื่อนที่ที่จำกัด และจำเป็นต้องพัฒนามอเตอร์เพิ่มเติมเพื่อให้แขนสามารถเคลื่อนที่ได้ 360 องศา เพื่อให้มีความยืดหยุ่นมากขึ้น “เพื่อทำเช่นนี้ นักศึกษาจำเป็นต้องวิจัยโดยใช้มอเตอร์ขนาดเล็กมากขึ้น และออกแบบแขนใหม่เพื่อให้มีพื้นที่เพียงพอสำหรับบรรจุชิ้นส่วนอิเล็กทรอนิกส์”

แขนหุ่นยนต์ได้รับการเปิดตัวในงานแข่งขันวิจัย ทางวิทยาศาสตร์ ของนักศึกษา มหาวิทยาลัยอุตสาหกรรมอาหารนครโฮจิมินห์ เมื่อวันที่ 3 มิถุนายน ภาพโดย: ฮา อัน
รองศาสตราจารย์ ดร. Truong Quang Vinh ผู้เชี่ยวชาญด้านไฟฟ้าและอิเล็กทรอนิกส์ กล่าวว่าผลิตภัณฑ์ที่ใช้อัลกอริทึมในการจดจำโครงกระดูกและท่าทางมือไม่ใช่ของใหม่ และความเร็วในการประมวลผลแบบเรียลไทม์ยังคงค่อนข้างช้า เขาแนะนำว่าผู้เขียนควรปรับแต่งอัลกอริทึมและอัปเกรดระบบฮาร์ดแวร์เพื่อช่วยประมวลผลภาพและให้ผลลัพธ์การจดจำเกี่ยวกับโครงกระดูกมือเพื่อให้ได้ความเร็วที่จำเป็น เพื่อให้หุ่นยนต์สามารถคว้าวัตถุได้แบบเรียลไทม์
ผลิตภัณฑ์ของ Khanh ได้รับรางวัลชมเชยในการแข่งขันวิจัยทางวิทยาศาสตร์ของนักศึกษา ประจำปีการศึกษา 2022-2023 จัดโดยภาควิชาวิทยาศาสตร์และเทคโนโลยี มหาวิทยาลัยอุตสาหกรรมอาหารนครโฮจิมินห์ เมื่อวันที่ 3 มิถุนายน
ฮาอัน
ลิงค์ที่มา





























































































การแสดงความคิดเห็น (0)