
 |
La máquina para resolver el cubo de Rubik, creada por un grupo de estudiantes, ha batido un récord mundial . Foto: cortesía del equipo . |
Un grupo de estudiantes de la Universidad de Purdue estableció recientemente un nuevo récord mundial Guinness con un robot diseñado por ellos mismos, capaz de resolver un cubo de Rubik en tan solo 0,103 segundos. Esto es tres veces más rápido que el récord anterior establecido por otro robot.
Detrás del récord no estaba un robot que se moviera más rápido. El equipo de estudiantes combinó un sistema de cámara de alta velocidad pero baja resolución, un cubo de Rubik diseñado a medida para mayor durabilidad y una técnica especial de resolución popular entre los que resuelven el cubo de Rubik de velocidad.
Diferenciadores clave en comparación con la competencia.
La carrera por construir robots que resolvieran el Cubo de Rubik comenzó en 2014, cuando un robot, ensamblado a partir de un kit de Lego Mindstorms y usando un teléfono Samsung Galaxy S4, resolvió el Cubo de Rubik en tan solo 3,253 segundos. En mayo de 2024, ingenieros de Mitsubishi Electric en Japón consiguieron el récord mundial con un robot que resolvió el Cubo de Rubik en 0,305 segundos.
Para reducir el tiempo de resolución del Cubo de Rubik del robot a menos de medio segundo, el equipo abandonó el uso de componentes Lego y, en su lugar, empleó piezas optimizadas, como motores industriales. Sin embargo, para alcanzar la marca de 0,103 segundos, el equipo de Purdue refinó la velocidad a la que su robot podía "ver" el Cubo de Rubik.
Quienes resuelven el Cubo de Rubik de Velocidad pueden observar el cubo antes de que comience el cronómetro. Sin embargo, este también tendrá en cuenta el tiempo que tarda el robot en identificar la ubicación de cada cuadrado de color en las caras.
El grupo de estudiantes utilizó dos cámaras de visión artificial de alta velocidad de Flir, con una resolución de tan solo 720x540 píxeles, colocadas en esquinas opuestas del cubo de Rubik. Cada cámara podía observar simultáneamente tres caras del cubo en una sola toma de tan solo 10 microsegundos.
") |
La tecnología de reconocimiento de color extremadamente rápida del robot. Foto: cortesía del autor. |
Las cámaras convencionales aún necesitan tiempo para procesar los datos del sensor y convertirlos en una imagen digital. Sin embargo, el Cubo de Purdubik, el robot creado por el grupo de estudiantes, utiliza un sistema de reconocimiento de imágenes personalizado que omite por completo este paso de procesamiento.
Este sistema se centra en un área muy pequeña (128 x 124 píxeles) dentro del fotograma que graba cada cámara, lo que reduce la cantidad de datos que se deben procesar. Los datos sin procesar de los sensores se envían directamente a un sistema de detección de color de alta velocidad, que utiliza valores RGB de regiones de muestra aún más pequeñas para determinar el color más rápido que los métodos convencionales y de IA.
Aunque este método es menos estable, puede garantizar que se cumpla el requisito principal del grupo. "Incluso con una precisión de solo el 90 %, es suficiente. Lo que realmente necesitamos es velocidad", comentó Patrohay, un estudiante del grupo.
Optimizar todo el sistema.
Patrohay argumenta que cada robot que batió récords anteriormente solía mejorar solo una característica destacada. El robot del equipo de estudiantes del MIT (2018) se centró en el uso de hardware industrial de alto rendimiento. El equipo de Mitsubishi Electric eligió motores eléctricos especializados, optimizados para girar cada cara del Cubo de Rubik.
Mientras tanto, el equipo de Purdue optó por un software de fácil acceso para optimizar todo el sistema, desde la cámara y el procesamiento de imágenes hasta el hardware y los algoritmos de resolución. Utilizaron Rob-Twophase de Elias Frantar, un algoritmo para resolver el Cubo de Rubik diseñado específicamente para robots, lo que les permitió aprovechar capacidades especiales como la rotación simultánea de ambas caras del Cubo de Rubik.
El grupo también utilizó una técnica que les permite comenzar a girar un lado del cubo de Rubik antes de completar la rotación del otro lado perpendicular a él. Este método ahorra mucho tiempo, pero corre el riesgo de dañar o incluso romper el cubo de Rubik si no se realiza en el momento adecuado o se aplica demasiada fuerza. Por lo tanto, los estudiantes tuvieron que adaptar aún más el cubo de Rubik para que resistiera la fuerza y funcionara con fluidez con esta técnica.
Según las reglas de la Asociación Mundial del Cubo de Rubik (WCA), los participantes pueden personalizar su Cubo de Rubik, siempre que pueda girar y funcionar como un cubo estándar, con 9 cuadrados de colores en cada cara y 6 caras de 6 colores diferentes. Se pueden usar materiales distintos del plástico, pero las secciones de color deben tener la misma textura superficial.
") |
Seis motores como estos se acoplarán a los lados restantes, encargados de girar el Cubo de Rubik. Foto: cortesía del autor. |
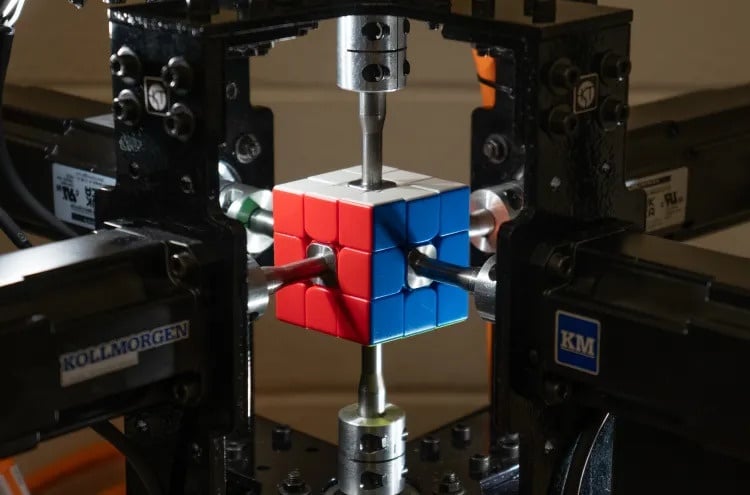
Para aumentar la durabilidad, el equipo de Purdue mejoró la estructura interna del Cubo de Rubik con una versión personalizada impresa en 3D, hecha con una resina de nailon SLS más resistente. Una mayor lubricación y tensión ayudan simultáneamente a reducir la sobrerotación y a mejorar el control.
El Cubo de Purdubik utiliza seis motores conectados a ejes metálicos ubicados en el centro de cada cara. Tras experimentar con diversos métodos, el equipo optó por un sistema de movimiento trapezoidal para que el robot pudiera alinear con precisión cada cara al detenerse.
Patrohay cree que Purdubik podría batir su propio récord si el Cubo de Rubik fuera más duradero y estuviera hecho de un material distinto al plástico. "Si se fabricara un Cubo de Rubik especializado completamente con un compuesto de fibra de carbono, creo que resistiría velocidades más altas. Eso permitiría acortar aún más el tiempo", afirmó.
Fuente: https://znews.vn/ben-trong-robot-giai-rubik-nhanh-nhat-the-gioi-post1557575.html

![[Imagen] El tenaz espíritu de lucha del fútbol femenino vietnamita](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F17%2F1765990260956_ndo_br_4224760955870434771-copy-jpg.webp&w=3840&q=75)
![[Foto] El primer ministro Pham Minh Chinh recibe al gobernador de la provincia de Tochigi (Japón)](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765892133176_dsc-8082-6425-jpg.webp&w=3840&q=75)
![[En vivo] Gala de los Premios de Acción Comunitaria 2025](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765899631650_ndo_tr_z7334013144784-9f9fe10a6d63584c85aff40f2957c250-jpg.webp&w=3840&q=75)
![[Imagen] Imágenes filtradas antes de la gala de los Premios de Acción Comunitaria 2025.](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765882828720_ndo_br_thiet-ke-chua-co-ten-45-png.webp&w=3840&q=75)
![[Foto] El Primer Ministro Pham Minh Chinh recibe al Ministro de Educación y Deportes de Laos, Thongsalith Mangnormek.](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F16%2F1765876834721_dsc-7519-jpg.webp&w=3840&q=75)

































































![[En directo] Ceremonia de clausura y entrega de premios del concurso de creación de videos y clips "Impresionante turismo en Vietnam" 2025](https://vphoto.vietnam.vn/thumb/402x226/vietnam/resource/IMAGE/2025/12/17/1765974650260_z7273498850699-00d2fd6b0972cb39494cfa2559bf85ac-1765959338756946072104-627-0-1338-1138-crop-1765959347256801551121.jpeg)
























Kommentar (0)