

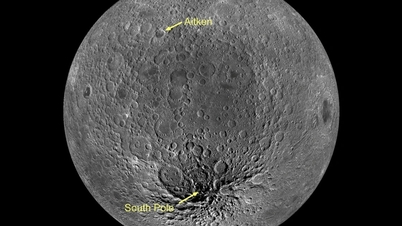
Simulation d'une voiture autonome en action dans le cadre du projet Chrono (Photo : Science Alert).
Cette découverte promet de changer la façon dont les robots d'exploration spatiale seront conçus à l'avenir.
Depuis plus d'un demi-siècle, depuis le lancement du premier rover extraterrestre en 1970, l'humanité n'a cessé d'améliorer les technologies d'exploration spatiale.
Cependant, même les rovers les plus avancés de la NASA ont rencontré à plusieurs reprises des problèmes qui ont entraîné l'enlisement de leurs roues dans le sable mou de la planète, perturbant ainsi leurs missions.
Le rover Spirit sur Mars en est un exemple frappant. Bloqué en 2009, il n'a pas bougé depuis. La cause exacte de ce blocage n'a été déterminée que récemment.
Selon Dan Negrut, ingénieur en mécanique à l'Université du Wisconsin-Madison (États-Unis), le problème réside dans le fait que les ingénieurs précédents n'ont considéré que l'impact de la gravité sur le rover, sans analyser pleinement l'impact de la faible gravité sur la surface sableuse des corps célestes.
Sur Mars ou sur la Lune, la faible gravité rend la poussière et le sable planétaires beaucoup plus meubles, plus mous et plus faciles à déplacer que sur Terre, réduisant considérablement l'adhérence et augmentant le risque de s'enliser.
Par ailleurs, les essais au sol précédents utilisant un sol simulé n'ont pas permis de reproduire correctement le comportement du sable dans des conditions de gravité extraterrestre, ce qui a entraîné des défauts de conception.

La roue du rover Opportunity s'est enlisée dans le sable sur Mars (Photo : NASA).
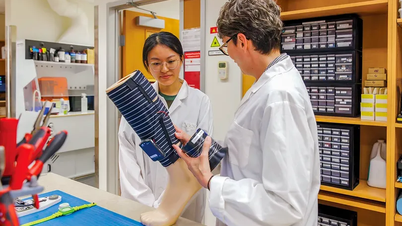
Pour résoudre ce problème, l'équipe a utilisé des simulations physiques dans le cadre du projet Chrono, afin de comparer les résultats avec des tests réalisés sur sable en conditions réelles. Les résultats ont révélé une différence flagrante : avec la même voiture, mais en microgravité, le sable était plus agité, ce qui la déstabilisait et rendait la propulsion des roues beaucoup plus difficile.
Cette découverte est considérée comme l'élément manquant pour améliorer la conception des robots d'exploration spatiale. En intégrant l'effet de la gravité du sable au modèle de test, les ingénieurs peuvent prédire la mobilité avec plus de précision, réduire le risque d'enlisement du véhicule et diminuer les coûts des missions.
« C’est une démonstration claire de la valeur de la simulation basée sur la physique pour résoudre les défis d’ingénierie du monde réel », a souligné Dan Negrut.
Grâce à cette nouvelle compréhension, les futures missions d'exploration spatiale seront équipées de rovers plus résistants et mieux adaptés aux terrains accidentés des planètes, contribuant ainsi à accroître les capacités d'exploration et de collecte de données scientifiques .
Source : https://dantri.com.vn/khoa-hoc/vi-sao-xe-tu-hanh-toi-tan-van-ket-banh-tren-sao-hoa-mat-trang-20250811081247437.htm
![[Photo] Le président Luong Cuong reçoit le secrétaire américain à la Guerre, Pete Hegseth.](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/11/02/1762089839868_ndo_br_1-jpg.webp)

![[Photo] Lam Dong : Images des dégâts suite à la rupture présumée d'un lac à Tuy Phong](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/11/02/1762078736805_8e7f5424f473782d2162-5118-jpg.webp)


































































































Comment (0)