
高さわずか3センチの日本の二足歩行バイオハイブリッドロボットは、筋肉を収縮させることで水中で移動し、方向転換もできる。
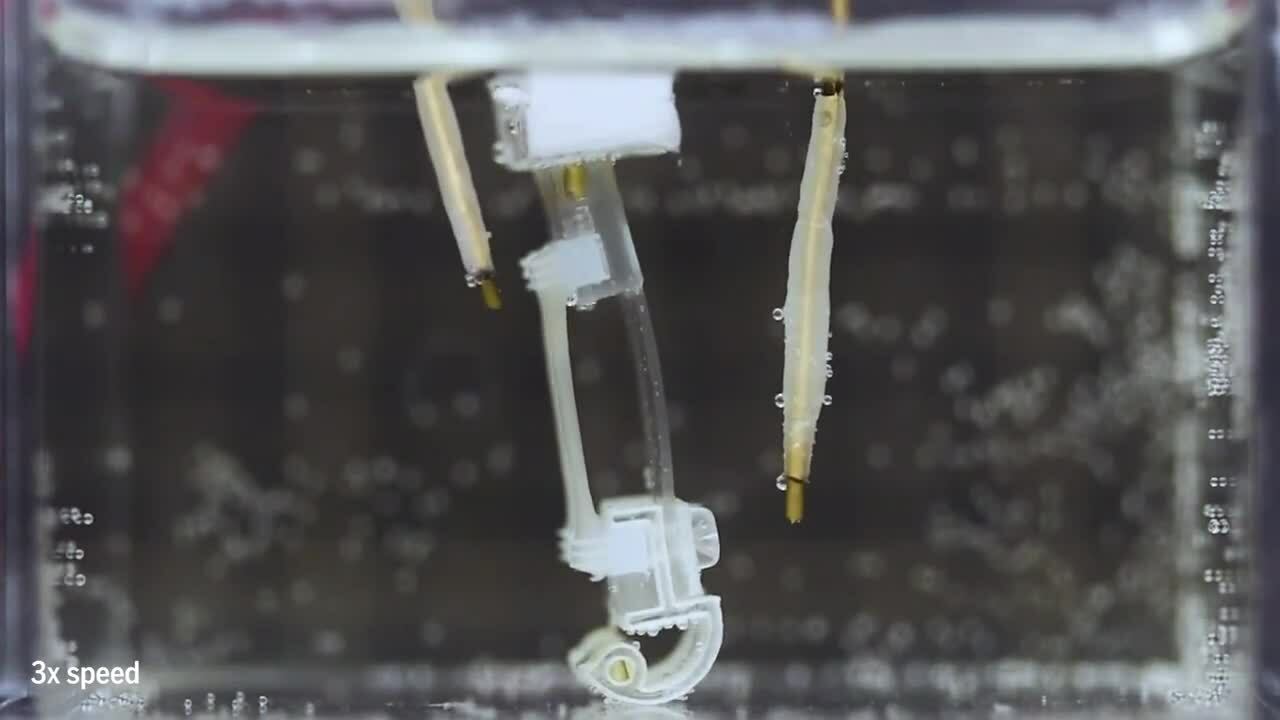
二足歩行ロボットが水中を歩く。 動画: Science.org
日本の科学者らが、筋肉組織と人工素材を組み合わせ、筋肉を収縮させることで歩行や方向転換ができる小型二足歩行ロボットを開発したと、ニューサイエンティスト誌が1月26日に報じた。この新たな研究は、マター誌に掲載された。
研究室で培養した筋肉を用いて、這ったり泳いだりできるバイオハイブリッドロボットがいくつか開発されています。しかし、この新型ロボットは、旋回や急旋回が可能な二足歩行ロボットとしては初めてです。片方の脚に電気を送り、筋肉を収縮させ、もう片方の脚は固定したままにすることで、このロボットの筋肉はバイオハイブリッドアクチュエーター、つまり電気エネルギーを機械力に変換する装置として機能します。
高さわずか3cmのこのロボットは、現時点では空中で自立することができず、水槽内では発泡スチロール製のブイを使って自立を補助している。ロボットの筋肉は、研究室でマウスの細胞から培養された。
「これはあくまで基礎研究です。このロボットをどこでも使える段階にはまだ至っていません。空中で動作させるには多くの課題を解決する必要がありますが、筋力を強化することで実現できると考えています」と、東京大学の竹内昭二研究員は述べた。
このロボットは人間の基準からするとまだ非常に遅く、1分間にわずか5.4mmしか動きません。また、5秒ごとに電気刺激を受けているため、90度回転するのに1分以上かかります。水中ではなく空中を歩行するためには、筋肉組織を維持するための栄養供給システムも必要です。
竹内氏は、電気刺激パターンの最適化と設計の改良により、ロボットの速度向上を目指している。「このバイオハイブリッドロボットの次のステップは、より洗練された歩行を可能にするために、関節と筋肉組織を追加したバージョンを開発することです。また、筋力を強化するために、分厚い筋肉を開発する必要もあります」と竹内氏は述べた。
「バイオハイブリッドロボットは、人工筋肉組織の研究だけでなく、生物学的アクチュエータの制御方法の研究にも有用なツールです。この種の研究を通じて力と制御が改善されるにつれて、このようなアクチュエータをより複雑なロボットに適用できる可能性が高まります」と、カーネギーメロン大学の専門家であるビクトリア・ウェブスター=ウッド氏は述べています。
Thu Thao (ニューサイエンティストによると)
[広告2]
ソースリンク




![[写真] 北部デルタの中心にある「木造傑作」の仏塔を鑑賞するためにフンイエンを訪問](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F11%2F21%2F1763716446000_a1-bnd-8471-1769-jpg.webp&w=3840&q=75)






































































































コメント (0)