
 |
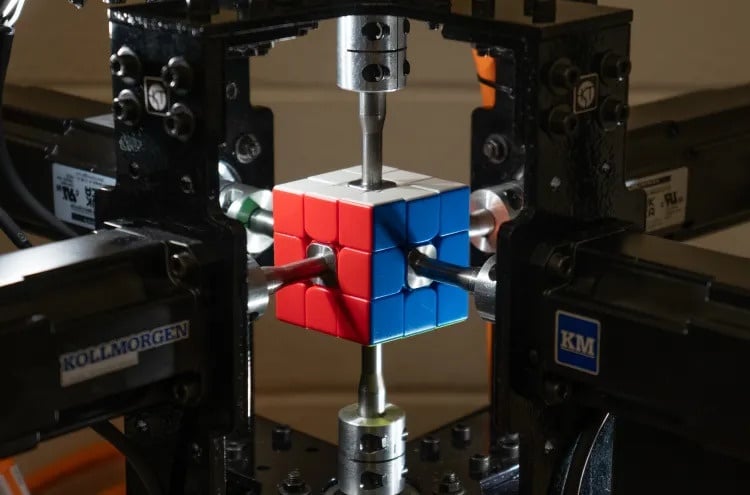
Verdensrekordbrytende Rubiks kube-løsermaskin av en gruppe elever. Foto: NVCC . |
En gruppe studenter ved Purdue University satte nylig en ny Guinness verdensrekord med en robot de selv designet, og løste en Rubiks kube på bare 0,103 sekunder. Dette er tre ganger raskere enn den forrige rekorden satt av en annen robot.
Rekorden ble ikke satt av en raskere robot. Studentene kombinerte et høyhastighetskamerasystem med lav oppløsning, en Rubiks kube tilpasset for holdbarhet og en spesiell løsningsteknikk som er populær blant profesjonelle innen hastighetsløsning.
Viktige forskjeller fra konkurrentene
Kappløpet om å bygge en Rubiks kube-løsende robot startet i 2014, da en robot bygget fra et Lego Mindstorms-byggesett og med en Samsung Galaxy S4-telefon løste kuben på bare 3,253 sekunder. I mai 2024 hevdet ingeniører hos Mitsubishi Electric i Japan at de hadde verdensrekorden med en robot som løste kuben på 0,305 sekunder.
For å få robotens tid ned til under et halvt sekund, droppet teamet Lego-komponenter og brukte i stedet optimaliserte deler som industrimotorer. Men for å nå 0,103 sekunder, justerte Purdue-teamet hastigheten roboten deres kunne «se» Rubiks kubes omstokking med.
Hastighetsløseren kan observere kuben før timeren starter. Timeren vil imidlertid også ta hensyn til tiden det tar for roboten å identifisere hvor hver fargede firkant er på sidene.
Studentene brukte to høyhastighets Flir maskinsynskameraer, med en oppløsning på bare 720 x 540 piksler, plassert i to motsatte hjørner av kuben. Hvert kamera kan observere tre av kubens flater samtidig i et enkelt bilde som bare varer i 10 mikrosekunder.
 |
Robotens ekstremt raske fargegjenkjenningsteknologi. Foto: NVCC. |
Konvensjonelle kameraer trenger fortsatt tid til å behandle dataene fra sensoren og gjøre dem om til et digitalt bilde. Purdubiks kube, som studentenes robot kalles, bruker imidlertid et tilpasset bildegjenkjenningssystem som hopper over bildebehandlingstrinnet helt.
Systemet fokuserer på et svært lite område (128 x 124 piksler) i bildet som tas opp av hvert kamera, noe som reduserer mengden data som må behandles. Rå sensordata sendes direkte til et høyhastighets fargedeteksjonssystem som bruker RGB-verdier fra enda mindre utvalgsområder for å bestemme fargen raskere enn både konvensjonelle metoder og AI.
Denne metoden, selv om den var mindre stabil, kunne oppfylle teamets primære krav. «Selv om nøyaktigheten bare var 90 %, ville det være godt nok. Det vi virkelig trengte var fart», sa Patrohay, en student i gruppen.
Optimaliser hele systemet
Patrohay sa at hver tidligere rekordbrytende robot vanligvis forbedret seg på ett fremtredende element. MIT-studentteamets robot (2018) fokuserte på bruk av industriell maskinvare med høy ytelse. Mitsubishi Electric-teamet valgte en spesialisert elektrisk motor, designet for å optimalisere rotasjonen til hver Rubiks kubeflate.
I mellomtiden valgte Purdue-teamet standard programvare for å optimalisere hele systemet, fra kamera, bildebehandling, maskinvare til løsningsalgoritmen. De brukte Elias Frantars Rob-Twophase, en Rubiks kube-løsningsalgoritme spesielt for roboter, som lar dem dra nytte av spesielle funksjoner som å rotere to Rubiks-ansikter samtidig.
Teamet brukte også en teknikk som tillot dem å begynne å rotere den ene siden av kuben før de fullførte rotasjonen av den andre siden vinkelrett på den. Denne metoden sparer mye tid, men risikerer også å skade eller til og med knuse kuben hvis timingen er feil eller det påføres for mye kraft. Derfor måtte studentene også tilpasse kuben for å tåle kraften og operere problemfritt med denne teknikken.
I følge reglene til World Rubik's Association (WCA) kan deltakerne tilpasse sin egen Rubiks kube, så lenge den fortsatt kan rotere og fungere som en standard kube, med 9 fargede firkanter på hver side og 6 sider med 6 forskjellige farger. Spillere kan bruke andre materialer enn plast, men de fargede delene må ha samme overflatetekstur.
 |
Seks slike motorer vil bli festet til de resterende sidene, med oppgaven å rotere Rubiks kube. Foto: NVCC. |
For å øke holdbarheten oppgraderte Purdue-teamet kubens indre struktur med en spesiallaget 3D-printet versjon laget av en sterkere SLS-nylonharpiks. Smøring og økt spenning bidrar også til å redusere oversving og forbedre kontrollen.
Purdubiks kube bruker seks motorer festet til en metallaksel sentrert på hver side av kuben. Etter å ha testet flere forskjellige metoder, bestemte teamet seg for et trapesformet bevegelsessystem som lar roboten nøyaktig justere hver side når den stopper.
Patrohay mener Purdubik kunne ha slått sin egen rekord hvis kuben hadde vært laget av et mer slitesterkt materiale enn plast. «Hvis man hadde laget en dedikert kube utelukkende av karbonfiberkompositt, tror jeg den ville ha vært i stand til å håndtere høyere hastigheter. Man kunne ha fortsatt å redusere tiden», sa han.
Kilde: https://znews.vn/ben-trong-robot-giai-rubik-nhanh-nhat-the-gioi-post1557575.html



![[Foto] Oppdag unike opplevelser på den første verdenskulturfestivalen](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/10/11/1760198064937_le-hoi-van-hoa-4199-3623-jpg.webp)





















![[Foto] Generalsekretær deltar i paraden for å feire 80-årsjubileet for grunnleggelsen av det koreanske arbeiderpartiet](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/10/11/1760150039564_vna-potal-tong-bi-thu-du-le-duyet-binh-ky-niem-80-nam-thanh-lap-dang-lao-dong-trieu-tien-8331994-jpg.webp)

































































Kommentar (0)