
กลุ่มนักศึกษาในนครโฮจิมินห์ได้สร้างมือหุ่นยนต์เพื่อช่วยฟื้นฟูการทำงานของมือในผู้ป่วยโรคหลอดเลือดสมอง ซึ่งจะช่วยลดความยากลำบากในการใช้ชีวิตประจำวันของพวกเขา
ผลิตภัณฑ์ซึ่งสร้างสรรค์โดยนักศึกษา 7 คนจากมหาวิทยาลัยอุตสาหกรรมโฮจิมินห์ซิตี้ ได้รับรางวัลชนะเลิศอันดับ 3 จากการแข่งขัน Smart City Initiative Competition (DigiTrans Smart City) ซึ่งจัดขึ้นในเดือนพฤศจิกายนที่ผ่านมา หุ่นยนต์มือนี้ช่วยให้ผู้ป่วยโรคหลอดเลือดสมองและผู้ที่มีปัญหาเกี่ยวกับเส้นประสาทและกล้ามเนื้อและโครงกระดูก พัฒนาการเคลื่อนไหวของมือให้ดีขึ้น
ตามที่ Tran Binh Nguyen ผู้จัดการฝ่ายเทคโนโลยีกลุ่มกล่าว อุปกรณ์ฟื้นฟูสมรรถภาพที่มีอยู่ในท้องตลาดปัจจุบันส่วนใหญ่จะเน้นที่การฝึกการเคลื่อนไหวการจับของมือทั้งหมด และไม่มีผลิตภัณฑ์มากนักที่เน้นการฝึกนิ้วมือและข้อต่อกระดูก
จากการสำรวจตลาด ทีมประเมินพบว่าการซื้อผลิตภัณฑ์ที่คล้ายคลึงกันจะมีค่าใช้จ่ายประมาณ 4-20 ล้านดอง ขึ้นอยู่กับประเภท ทีมต้องการผลิตภัณฑ์ที่ราคาไม่แพงและมีระบบการฝึกที่หลากหลาย จึงได้สร้างระบบขับเคลื่อนแบบโครงกระดูกภายนอก (exoskeleton) ที่มีกลไกการทำงานคล้ายกับมือมนุษย์ โดยทำงานอัตโนมัติด้วยต้นทุนต่ำเพียง 600,000-2 ล้านดอง เพื่อให้ผู้ป่วยสามารถฝึกฝนที่บ้านได้
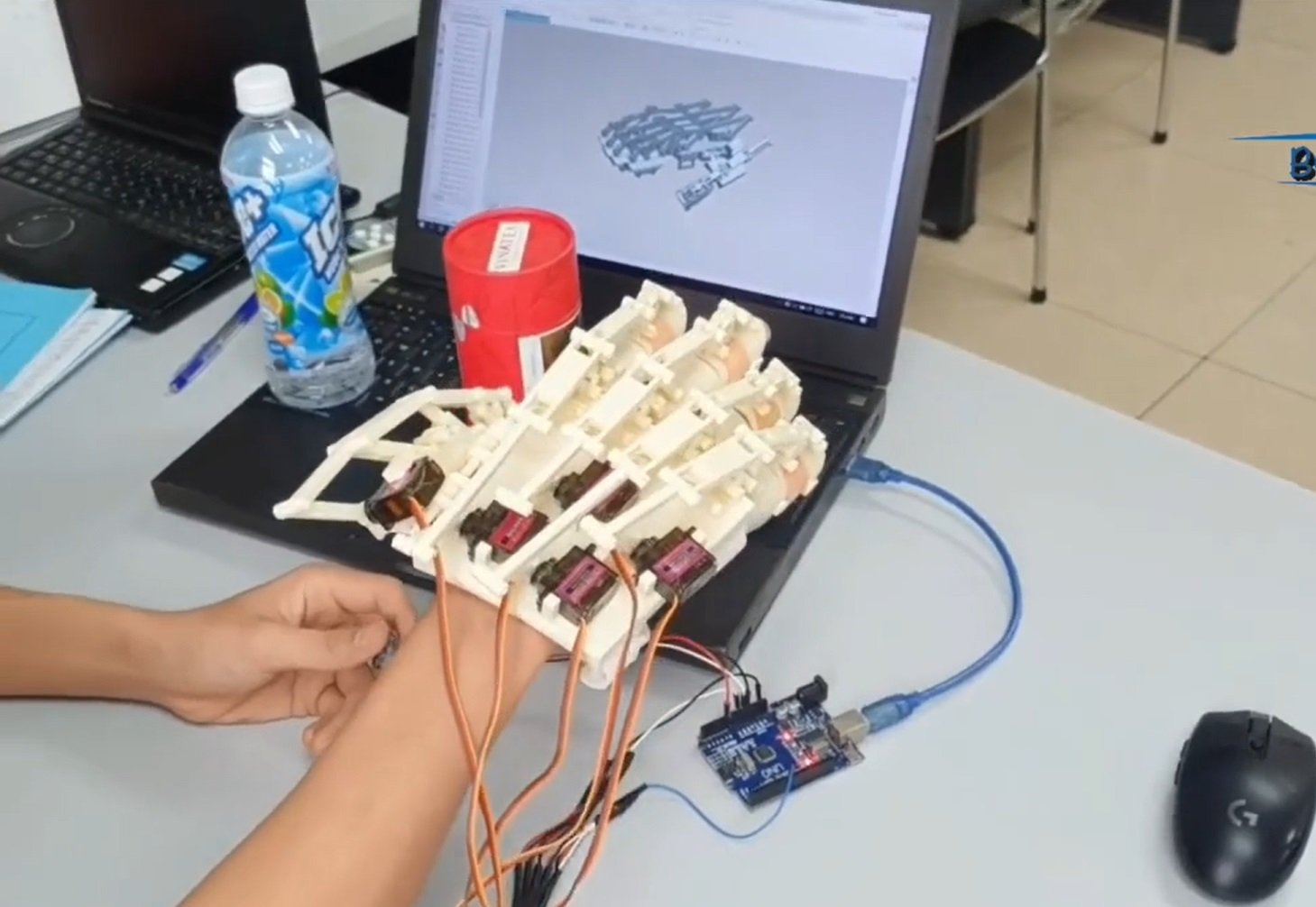
โครงมือทำจากวัสดุไบโอพลาสติก PLA และได้รับการออกแบบให้มีขนาดข้อต่อและมุมงอและเหยียดเท่ากับมือของผู้ใหญ่ หน้าที่หลักของข้อต่อนิ้วมือคือการสร้างมุมที่เหมาะสมกับจุดสำคัญเมื่อฝึกตามโปรแกรมการรักษาในแต่ละขั้นตอน พร้อมทั้งมั่นใจว่านิ้วมือจะไม่บิดหรือเอียงระหว่างการฝึก
เมื่อหุ่นยนต์ทำงาน ก้านข้อเหวี่ยงจะส่งแรงเคลื่อนไหวไปยังก้านสูบเพื่อดันกลไกไปข้างหน้า ขณะเดียวกันก็จะดันข้อนิ้วที่หมุนอยู่ทางอ้อมเพื่อสร้างการเคลื่อนไหวของนิ้วมือ มอเตอร์เซอร์โวถูกติดตั้งไว้ในโครงหุ่นยนต์เพื่อประสานการเคลื่อนไหวของนิ้วมือ ทำให้ง่ายต่อการจับหรือฝึกยืดกล้ามเนื้อ
แนะนำแขนหุ่นยนต์กายภาพบำบัดของทีม วิดีโอ : ทีมวิจัย
ในการออกแบบผลิตภัณฑ์ ทีมงานได้ใช้ข้อมูลจากผู้ป่วยจริงเพื่อคำนวณแรงที่จำเป็น นอกจากนี้ ทีมงานยังได้ขอความช่วยเหลือจากแพทย์ผู้เชี่ยวชาญด้านมือและกายภาพบำบัด เพื่อให้คำแนะนำในการพัฒนาแนวทางการรักษาสำหรับโรคแต่ละประเภท ซึ่งช่วยให้สามารถตั้งโปรแกรมการออกกำลังกายที่เหมาะสมกับผู้ป่วยได้
ขณะใช้งาน ผู้ใช้จะสวมอุปกรณ์ไว้ที่มือ โดยใช้สายรัดผ้ายางเพื่อยึดปลายนิ้ว อุปกรณ์มีปุ่มควบคุมในตัวพร้อมฟังก์ชันการออกกำลังกาย ผู้ใช้ตั้งค่าโหมดต่างๆ ตามโปรแกรมการรักษาในแต่ละขั้นตอน เช่น การยืดกล้ามเนื้อ การจับ การฝึกนิ้วแต่ละนิ้ว... เพื่อให้ผู้ป่วยสามารถใช้งานได้ง่าย
เพื่อประเมินความสามารถในการนำไปใช้ ทีมวิจัยได้ทดสอบกับผู้ป่วยที่โรงพยาบาลแห่งหนึ่งใน เมืองบิ่ญเซือง ผู้ป่วยใช้หุ่นยนต์ช่วยพยุงการงอและเหยียดมือ ซึ่งช่วยสร้างการตอบสนองจากมือไปยังสมอง ด้วยการฝึกวันละสองครั้ง ครั้งละหนึ่งชั่วโมง หลังจากการรักษาหนึ่งเดือน ผู้ป่วยสามารถขยับนิ้วมือได้เบาๆ โดยมีอัตราการฟื้นตัวประมาณ 30% ในเดือนต่อมา ผู้ป่วยเพิ่มความถี่ในการฝึกเป็นสี่ครั้งต่อวัน โดยเพิ่มความเข้มข้นในการฝึกให้เร็วขึ้น ทำให้อัตราการฟื้นตัวอยู่ที่ 60-70% เมื่อถึงเดือนที่สาม ผู้ป่วยสามารถถือวัตถุที่มีน้ำหนัก 100 กรัม และถือแก้วดื่มน้ำได้

ผู้ป่วยสามารถถือแก้วและดื่มน้ำได้หลังจากใช้อุปกรณ์ของทีม ภาพ: NVCC
บิญเหงียนกล่าวว่าข้อจำกัดของผลิตภัณฑ์คือการออกแบบเชิงกลของระบบส่งกำลังที่ไม่เหมาะสม ยังคงมีขนาดใหญ่ และอาจทำให้ใช้งานยาก นอกจากนี้ ระบบควบคุมยังต้องควบคุมผ่านคอมพิวเตอร์ และไม่มีแอปพลิเคชันควบคุมผ่านโทรศัพท์เพื่อความสะดวกยิ่งขึ้น
ในอนาคตอันใกล้นี้ กลุ่มบริษัทมีแผนที่จะสร้างผลิตภัณฑ์ขนาดกะทัดรัดที่ไม่เพียงแต่ช่วยบริหารมือเท่านั้น แต่ยังรวมถึงส่วนอื่นๆ ของร่างกายด้วย ซึ่งจะช่วยให้แพทย์สามารถรวบรวมข้อมูลสำคัญเพื่อวางแผนการรักษาเพื่อให้ผู้ป่วยฟื้นตัวได้เร็วขึ้น
ตัวแทนสมาชิกกลุ่มได้รับรางวัลชนะเลิศอันดับที่ 3 ในการแข่งขันโครงการ Smart City Building Initiative Competition ซึ่งจัดโดยศูนย์บ่มเพาะธุรกิจไฮเทค ณ นครโฮจิมินห์ ไฮเทคพาร์ค เมื่อเดือนพฤศจิกายน ภาพ: SHTP-IC
คุณกว้าช อันห์ เซิน รองผู้อำนวยการศูนย์บ่มเพาะธุรกิจเทคโนโลยีขั้นสูง อุทยานเทคโนโลยีขั้นสูงนครโฮจิมินห์ ประเมินว่าผลิตภัณฑ์ของกลุ่มบริษัทแสดงให้เห็นถึงการลงทุนด้านเทคโนโลยีที่สูงและมีศักยภาพในการนำไปประยุกต์ใช้กับผู้ป่วยโรคหลอดเลือดสมอง ซึ่งมีแนวโน้มเพิ่มขึ้นในช่วงไม่กี่ปีที่ผ่านมา อย่างไรก็ตาม การที่ผลิตภัณฑ์จะเข้าสู่ตลาดได้นั้น จำเป็นต้องมีกระบวนการปรับปรุงเทคโนโลยีและการทดสอบกับผู้ป่วยจำนวนมากเพื่อประเมินประสิทธิภาพ
นายเซ็น กล่าวว่า ทางศูนย์บ่มเพาะฯ จะพิจารณานำโครงการต่างๆ เข้ามาร่วมโครงการบ่มเพาะฯ เพื่อสนับสนุนทรัพยากร เพื่อให้ผลิตภัณฑ์สามารถพัฒนาเทคโนโลยีอย่างต่อเนื่องและออกสู่ตลาดได้ในอนาคต
ฮาอัน
ลิงค์ที่มา

![[ภาพ] นายกรัฐมนตรี Pham Minh Chinh พบปะกับตัวแทนครูดีเด่น](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/11/15/1763215934276_dsc-0578-jpg.webp)
![[ภาพ] เลขาธิการโต ลัม ต้อนรับรองประธานบริษัท Luxshare-ICT Group (ประเทศจีน)](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/11/15/1763211137119_a1-bnd-7809-8939-jpg.webp)

![[ภาพ] ภาพพาโนรามารอบสุดท้ายของรางวัล Community Action Awards ประจำปี 2025](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2025/11/15/1763206932975_chi-7868-jpg.webp)

































































































การแสดงความคิดเห็น (0)