
Das Projekt „Surface Avatar“ wurde 2020 ins Leben gerufen und wird von der Deutschen Raumfahrtagentur (DLR) in Zusammenarbeit mit der Europäischen Weltraumorganisation (ESA) durchgeführt. Ziel des Projekts ist die Entwicklung einer Technologie, die es Astronauten ermöglicht, mehrere Roboter unabhängig und gleichzeitig mit hoher Präzision zu steuern oder sie im Weltraum teil- oder vollautonom zu betreiben. Man hofft, dass diese Robotersysteme bei der erneuten Erforschung des Mondes und des Mars eingesetzt werden, um die bemannten Expeditionen zu unterstützen.
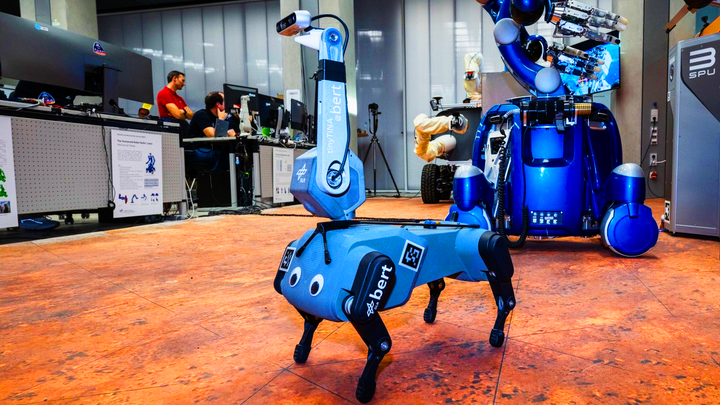
Der hundeähnliche Roboter Bert erhält im Weltraum Steuerungsunterstützung von einem Astronauten. (Foto: ESA/Andreas Mogensen/X).
Kürzlich steuerte Marcus Wandt, Astronaut auf der Internationalen Raumstation (ISS) der Europäischen Weltraumorganisation (ESA), erstmals Bert, einen vierbeinigen, hundeähnlichen Roboter, aus dem Weltraum. Mit diesem Experiment wollte er testen, wie sich Zeitverzögerungen auf die Robotersteuerung während Weltraummissionen auswirken.
Während der Tests befand sich Wandt an Bord des Columbus-Moduls der Internationalen Raumstation (ISS) und steuerte den Roboter Bert, der sich im Marslabor des Deutschen Zentrums für Luft- und Raumfahrt (DLR) in Oberpfaffenhofen befand. In einer Reihe von Tests übernahm Wandt die Kontrolle über drei verschiedene Roboter; er begann mit Bert.
Nachdem Wandt eine Zeit lang die Kontrolle über Bert übernommen hatte, erlaubte er dem Roboter, in einer simulierten Umgebung autonom zu erkunden, während er gleichzeitig die Kontrolle über den radgetriebenen humanoiden Serviceroboter Rollin Justin der Deutschen Raumfahrtagentur und den Interact Rover der Europäischen Weltraumorganisation übernahm.

Astronaut Marcus Wandt testete erfolgreich die Steuerung von Bert, einem vierbeinigen, hundeähnlichen Roboter. (Foto: ESA/Andreas Mogensen/X).
Das Experiment, an dem mehrere Roboter beteiligt waren, dauerte zweieinhalb Stunden und wurde erfolgreich abgeschlossen. Der Projektleiter der Deutschen Raumfahrtagentur erklärte: „Wenn der Roboter Bert statt mit Rädern auf Beinen fährt, könnte er leichter Hügel erklimmen oder in Höhlen auf dem Mars oder anderen außerirdischen Welten kriechen.“
Ein weiterer Vertreter des Deutschen Raumfahrtzentrums merkte an, dass bisher nur Roboter mit Rädern von Astronauten aus dem Weltraum ferngesteuert wurden. Bert beherrscht jedoch bereits mehrere Gangarten und kann dank seiner flexiblen Beinbewegungen sogar unwegsames Gelände, einschließlich Höhlen, erkunden.
HUYNH DUNG (Quelle: Space/Europeanspaceflight)
Quelle


![[Bild] Nahaufnahme des Autobahnkreuzes, das die beiden Schnellstraßen und den Flughafen Long Thanh verbindet.](https://vphoto.vietnam.vn/thumb/1200x675/vietnam/resource/IMAGE/2026/05/25/1779703378210_ndo_br_z7863716673926-224453a31600126cce10622af6290afd-4549-jpg.webp)






































































































Kommentar (0)