
قام كاو كوك خانه، وهو طالب بجامعة صناعة الأغذية في مدينة هوشي منه، بإنشاء ذراع آلية تحاكي حركات الذراع البشرية الأساسية، لاستخدامها في المصانع ولمساعدة المرضى.
صُنع الذراع الروبوتي من قِبل خان، طالب في السنة النهائية بتخصص هندسة التحكم والأتمتة بكلية الهندسة الكهربائية والإلكترونية، نهاية العام الماضي بهدف مساعدة الأفراد على أداء المهام في بيئات قاسية، مثل المناطق ذات درجات الحرارة العالية، والمناطق المليئة بالغازات السامة... في المختبرات أو المصانع. كما يُمكن لهذا المنتج مساعدة الأشخاص ذوي الإعاقة الذين لا يستطيعون الحركة في غرفهم، حيث يُمكنهم استخدام الذراع الروبوتي للتحكم في توصيل الطعام والمشروبات.
يتمتع الذراع الروبوتي الذي ابتكره خانه بشكل عظمي يشبه الذراع البشرية، وهو مصنوع من مادة بلاستيكية PLA (حمض البوليكتيك) مطبوعة بتقنية ثلاثية الأبعاد.
قال خان إن بلاستيك PLA صلب ومتين ورخيص الثمن، مما يُساعد الذراع على الحركة بثبات ومرونة أكبر. يوجد داخل الذراع خمسة محركات سيرفو تربط الأصابع بنظام من خيوط الصيد (تُستخدم كخيوط صيد) صغيرة الحجم، لكنها تتحمل قوة تزيد عن 200 رطل، أي ما يعادل حوالي 100 كجم. ويُعتبر هذا "وترًا" يتحكم في حركة الذراع بأكملها.
عندما يحرك المستخدم يده، تسجل الكاميرا بدقة 8 ميجابكسل الصورة وتنقلها إلى لوحة معالجة إشارات Raspberry Pi للتحكم في حركة الذراع وفقًا للحركة الفعلية في الخارج. يحتوي الذراع أيضًا على شدادات تساعد على تمديد قوة قبضة الأصابع باستمرار، مما يقلل من قوة سحب ترس المحرك، ويمنع ارتفاع درجة حرارة المحرك عند التشغيل المستمر.
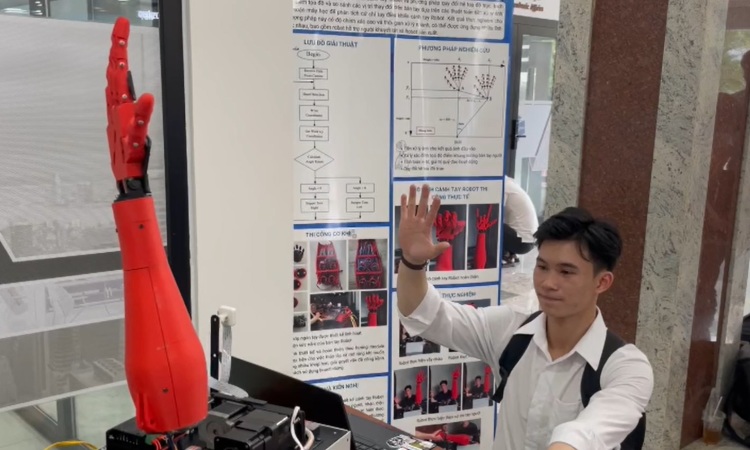
كاو كوك خانه يختبر التحكم بذراع روبوتية بالإيماءات. فيديو : ها آن
قال المؤلف إنه بسبب استخدام لوحة Raspberry Pi، يعمل النظام بتأخير، إذ يستغرق تنفيذ إيماءات اليد حوالي ثانية واحدة بعد إشارة المستخدم. وللحد من هذا العيب، قال خانه إن إكمال واستخدام لوحة تستجيب للأوامر بشكل أفضل يستغرق وقتًا، مما يساعد على تقليل التأخير. بالإضافة إلى ذلك، يحاكي الذراع الروبوتي الجديد الحركات من أطراف الأصابع إلى الكوع، لذا فهو يعمل فقط على إحداثيات ثنائية الأبعاد. ويحتاج الذراع الروبوتي إلى إكماله ليعمل من الأصابع إلى الكتف، لأنه عندما يتحرك الذراع على إحداثيات ثلاثية الأبعاد، فإنه يستطيع أداء حركات أكثر تعقيدًا وواقعية. وقال خانه عن النوايا المستقبلية لمنتجه الأول: "يحتاج هذا المنتج إلى مزيد من البحث لجعله يعمل بشكل أسرع وأكثر حساسية. ومن خلال هذا الذراع، يمكن تطويره إلى روبوت كامل يتفاعل مع البشر".
قيّم الأستاذ تران هوان، المحاضر في كلية الهندسة الكهربائية والإلكترونية بجامعة مدينة هو تشي منه للصناعات الغذائية، هذا التوجه البحثي باستخدام معالجة الصور لتطبيق الذكاء الاصطناعي الذي يُمكن أن يحل محل استخدام المستشعرات التقليدية للتحكم في الأذرع الروبوتية اليوم. سيكتسب الطلاب، عند تصنيع المنتجات، مهارات التصميم الميكانيكي وخبرة في برمجة المتحكمات الدقيقة، وهو أمرٌ مفيدٌ جدًا للمستقبل.
مع ذلك، أشار السيد هوان إلى أن المنتج يتميز بنصف قطر حركة محدود، ومن الضروري تطوير المزيد من المحركات لتمكين الذراع من الحركة بزاوية 360 درجة، مما يجعله أكثر مرونة. وأضاف: "ولتحقيق ذلك، يحتاج الطلاب إلى البحث في استخدام محركات أصغر حجمًا، وإعادة تصميم الذراع لتوفير مساحة كافية لاحتواء المكونات الإلكترونية".

تم تقديم الذراع الروبوتية في مسابقة البحث العلمي للطلاب بجامعة صناعة الأغذية في مدينة هوشي منه في 3 يونيو. الصورة: ها آن
صرح الأستاذ المشارك، الدكتور ترونغ كوانغ فينه، الخبير في مجال الكهرباء والإلكترونيات، بأن المنتج الذي يستخدم خوارزمية التعرف على الهيكل العظمي وإيماءات اليد ليس جديدًا، وأن سرعة المعالجة الفورية لا تزال بطيئة. واقترح على الباحث تحسين الخوارزمية وتحديث نظام الأجهزة للمساعدة في معالجة الصور والحصول على نتائج التعرف على هيكل اليد، بما يحقق السرعة اللازمة، ليتمكن الروبوت من التقاط الأشياء في الوقت الفعلي.
فاز منتج خانه بجائزة التشجيع في مسابقة البحث العلمي للطلاب للعام الدراسي 2022-2023 التي نظمتها إدارة العلوم والتكنولوجيا بجامعة صناعة الأغذية في مدينة هوشي منه في 3 يونيو.
ها آن
[إعلان 2]
رابط المصدر






































































































تعليق (0)