
W miarę jak świat doświadcza eksplozji automatyzacji, robotyki i sztucznej inteligencji (AI), technologie sensoryczne i inteligentne systemy interaktywne stają się filarami przemysłu, usług i opieki zdrowotnej . Innowacje te nie tylko zwiększają produktywność i optymalizują koszty, ale także otwierają nowe możliwości poprawy jakości życia i dążenia do zrównoważonego rozwoju.
Tą treść zaprezentowano na seminarium „Roboty i inteligentna automatyzacja” zorganizowanym przez Fundację VinFuture rano 4 grudnia w Hanoi .
Dyskusja koncentrowała się na wielu ważnych aspektach robotyki: robotach humanoidalnych z możliwością interakcji społecznych, robotach współpracujących w służbie zdrowia i medycynie, systemach robotyki rehabilitacyjnej oraz gorących kwestiach związanych z bezpieczeństwem sztucznej inteligencji i etyką technologii. Treści te odzwierciedlają trend rozwoju robotów w kierunku humanizmu, bezpieczeństwa i zrównoważonego rozwoju.
Miękkie materiały: podstawa elastycznych robotów
Podczas seminarium profesor Kurt Kremer – honorowy dyrektor Instytutu Badań nad Polimerami im. Maxa Plancka (Niemcy) – podkreślił, że miękkie materiały otwierają nowy kierunek dla robotów dzięki swojej elastyczności, łatwości produkcji i przyjazności dla środowiska. Polimery, które są szeroko stosowane ze względu na swoją taniość, dostępność i możliwość regulacji twardości, są rozwijane w kierunku lepszej nośności i skuteczniejszej biodegradacji.
Kluczem, jak twierdzi, jest to, że są to „inteligentne” materiały, które mogą rozszerzać się lub zmieniać kształt pod wpływem bodźców takich jak temperatura, pH, ciśnienie czy zmiany środowiska. Dzięki swojej czułości i szybkości reakcji mogą one sterować zaworami, wytwarzać siły mechaniczne lub stać się wysoce zaawansowanymi komponentami robotycznymi.
. (Zdjęcie: Minh Son/Vietnam+)")
Gdy polimery zostaną połączone w złożone struktury, takie jak żele lub „szczotki”, materiały te mogą podejmować się trudnych zadań mechanicznych, co pomaga w produkcji miękkich siłowników, dzięki którym roboty mogą chwytać delikatniej i precyzyjniej.
Wiele polimerów charakteryzuje się również wysoką przewodnością lub dielektrycznością, co otwiera możliwości dla elektroniki organicznej. Choć nie mogą konkurować z krzemem pod względem szybkości, są tańsze, łatwiejsze w produkcji, nie wymagają metali ziem rzadkich i znalazły zastosowanie w wyświetlaczach OLED, składanych telefonach i organicznych panelach słonecznych.
Profesor Kremer uważa, że łącząc wszystkie trzy elementy: miękkość, responsywność i właściwości elektroniczne, materiały organiczne mogą przekształcić się w formę „neuromorficzną”, naśladującą adaptację układu nerwowego. Uważa się to za fundament przyszłych generacji robotów, które będą elastyczne, bezpieczne i zoptymalizowane pod względem kosztów.
Profesor Ho Young Kim (Narodowy Uniwersytet Seulski, Korea) zwrócił uwagę, że patrząc z praktycznego punktu widzenia, roboty stają przed dużymi wyzwaniami związanymi z manipulowaniem miękkimi materiałami – grupą materiałów, które występują wszędzie, od ubrań, żywności, plastikowych toreb i przewodów elektrycznych po sprzęt medyczny.
Tradycyjne roboty są zoptymalizowane pod kątem sztywnych, stabilnych kształtowo obiektów. Ale miękkie materiały są zupełnie inne – dodał. Na przykład, gdy robot trzyma koszulkę, wystarczy zmienić punkt chwytu, a kształt koszulki ulega zmianie, powierzchnia koszulki może się pofałdować i pomarszczyć, tworząc niezliczone, złożone parametry.
")
To, co ludzie potrafią zrobić w kilka sekund, na przykład podwinąć rękawy czy złożyć pranie, stanowi ogromne wyzwanie dla robotów. To, jak powiedział, jest również paradoksem współczesnej sztucznej inteligencji: potrafi ona rozwiązywać równania i zapamiętywać ogromne ilości danych, ale ma trudności z wykonywaniem podstawowych czynności domowych.
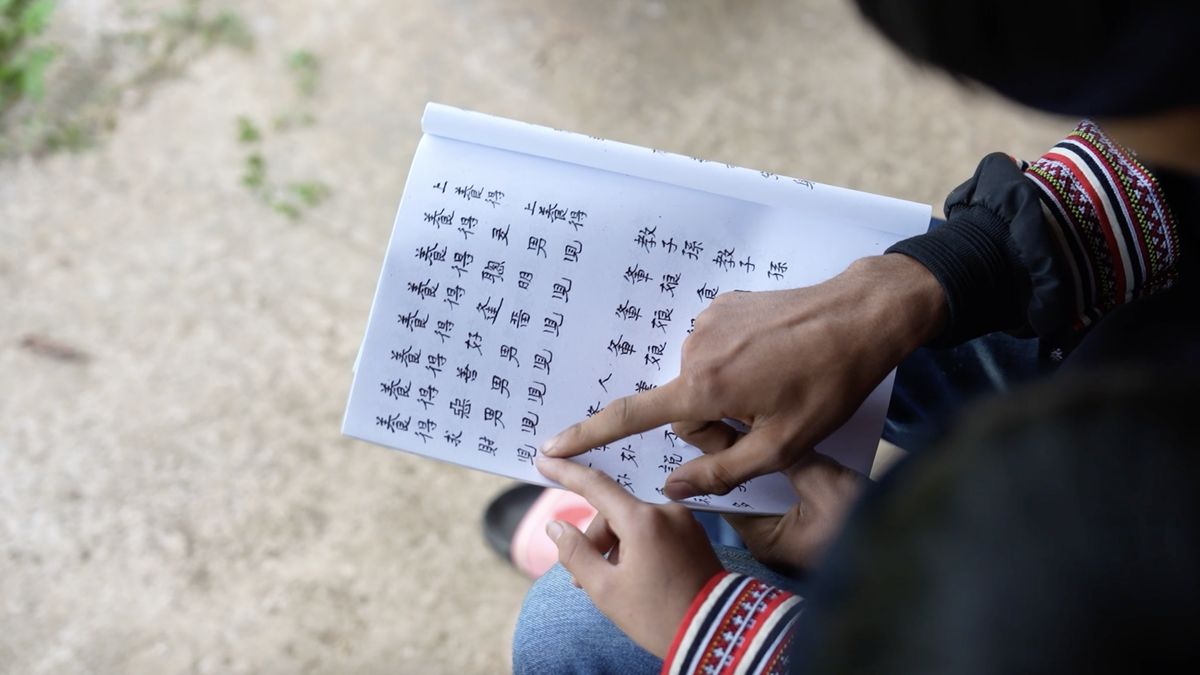
W ramach swoich badań zespół opracował system chwytaków wykorzystujący elastyczne membrany, który umożliwia stabilne podnoszenie pojedynczych tkanin, a nawet miękkich obiektów biologicznych, takich jak skórki pomarańczy.
Bazując na tej technologii, zespół badawczy stworzył maszynę, która wykonuje numerowanie – ważną czynność, którą wcześniej mogli wykonywać tylko ludzie. Maszyna może powtarzać tę operację wielokrotnie, nie popełniając żadnych błędów.
Według niego, aby rozwiązać problem miękkich materiałów, roboty muszą sprostać czterem wyzwaniom: zdolności precyzyjnego postrzegania stanu materiałów; odpowiednio delikatnej mechanicznej ręki; elastycznego systemu sterowania w obliczu ciągłych zmian; oraz zdolności do rozbudowy w celu masowej produkcji. Doszedł do wniosku, że obróbka miękkich materiałów to „drzwi” dla robotów, aby mogły naprawdę wejść w życie i produkcję.
Roboty humanoidalne i wymagania dotyczące inteligencji fizycznej
Profesor Tan Yap Peng – rektor VinUni – powiedział, że roboty humanoidalne stają się coraz popularniejsze, ponieważ mogą z łatwością funkcjonować w środowisku ludzkim. Przewiduje się, że do 2050 roku na świecie może żyć i pracować z ludźmi co najmniej miliard robotów.
Największym wyzwaniem jest to, że dzisiejsze roboty są w większości zaprogramowane do wykonywania jednego zadania. Aby przejść do robotów wielozadaniowych, technologia musi uczyć się z dużych modeli językowych: robotów szkolonych na dużych ilościach danych wideo, aby rozwinąć zdolność rozumienia świata fizycznego.
")
Ale przejście od języka do wizji i działania to długa podróż. Roboty muszą obserwować, rozumować i otrzymywać instrukcje – umiejętności, które pozostają otwarte.
Profesor Tan Yap Peng podał również przykłady modeli, takich jak „Inteligencja fizyczna typu zero”, które umożliwiają robotom odbieranie danych obrazowych, wideo i mowy oraz wykonywanie różnych czynności sterujących. Jednak w przypadku złożonych zadań, takich jak składanie ubrań czy pranie, roboty nadal wymagają dopracowania i ilustracyjnych danych od ekspertów.
Największym ograniczeniem, zdaniem profesora Tana, jest to, że roboty nie mają takiej samej pamięci jak ludzie. Dlatego jego zespół zaproponował przechowywanie „fragmentów pamięci” z demonstracji eksperckich, co pozwoli robotom wyszukiwać i wykorzystywać podobne doświadczenia w obliczu nowych zadań. Takie podejście zmniejsza liczbę błędów i zwiększa zdolność do wykonywania długotrwałych zadań.
Jednocześnie roboty muszą rozwiązywać problemy związane z energią, sprawnością manualną, samodiagnostyką, bezpieczeństwem obsługi i przestrzeganiem norm etycznych. Zdaniem Profesora, są to ogromne problemy, które należy rozwiązać w ciągu najbliższych 30-50 lat.
 oraz dyrektor naukowy (CSO) w VinMotion. (Zdjęcie: Minh Son/Vietnam+)")
Z perspektywy przemysłowej, dr Nguyen Trung Quan, adiunkt inżynierii lotniczej i kosmicznej na Uniwersytecie Południowej Kalifornii (USC) i dyrektor naukowy (CSO) w VinMotion, stwierdził, że wraz z przejściem od sztucznej inteligencji cyfrowej do inteligencji fizycznej, dane stają się czynnikiem deficytowym. Świat dynamicznie przechodzi na roboty ogólnego przeznaczenia, ponieważ oferują one zdolność do działania – czego nie potrafi sztuczna inteligencja w czystej postaci.
Wiele prognoz wskazuje, że w ciągu najbliższych 10 lat rynek robotów humanoidalnych i inteligencji fizycznej może osiągnąć wartość 10 000 miliardów dolarów amerykańskich, biorąc pod uwagę niedobory siły roboczej w wielu krajach.
Jednak zdaniem dr Quana, inteligencja fizyczna stoi w obliczu „błędnego koła pierwszego lepszego”: dobra sztuczna inteligencja wymaga prawdziwych danych; prawdziwe dane wymagają robotów do działania; a roboty, które działają skutecznie, potrzebują silnej sztucznej inteligencji.
„VinMotion realizuje model „człowiek w pętli”, wprowadzając roboty do rzeczywistych środowisk, umożliwiając ludziom monitorowanie, wspieranie i reagowanie w trudnych sytuacjach. Model ten zapewnia bezpieczeństwo i pomaga sztucznej inteligencji szybciej się uczyć, tworząc platformę skalowalną” – powiedział pan Quan.
Według niego, roboty humanoidalne wymagają trzech czynników: dobrego sprzętu, dobrego oprogramowania/sztucznej inteligencji oraz bezpiecznego systemu wdrażania. Wietnam jest jednym z krajów, które są w stanie spełnić wszystkie te trzy czynniki jednocześnie.
Source: https://www.vietnamplus.vn/ky-nguyen-robot-va-thach-thuc-lon-tren-hanh-trinh-buoc-vao-doi-song-con-nguoi-post1080970.vnp




![[Zdjęcie] Cat Ba - Zielony raj na wyspie](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F04%2F1764821844074_ndo_br_1-dcbthienduongxanh638-jpg.webp&w=3840&q=75)






















































![[40 dni błyskawicznej jazdy VIMC] Port Da Nang: Jedność – Błyskawiczna prędkość – Przełom na mecie](https://vphoto.vietnam.vn/thumb/402x226/vietnam/resource/IMAGE/2025/12/04/1764833540882_cdn_4-12-25.jpeg)














































Komentarz (0)