
ホーチミン市食品工業大学の学生カオ・クオック・カンさんは、工場での使用や患者の介助のために、人間の腕の基本的な動きを模倣したロボットアームを開発した。
このロボットアームは、電気電子工学部制御・自動化工学科の最終学年であるカーン氏によって昨年末に製作されました。高温や有毒ガスが発生する場所など、実験室や工場といった過酷な環境での作業を支援することを目的としています。また、室内での移動が難しい障害者の支援にも活用できます。ロボットアームを使って、食べ物や飲み物の配給を制御することも可能です。
カーン氏が製作したロボットアームは、人間の腕に似た骨の形をしており、3DプリントされたPLA(ポリ乳酸)プラスチック素材で作られています。
カーン氏によると、PLA樹脂は硬く、耐久性があり、安価であるため、アームの動きがより強固かつ柔軟になるという。アーム内部には5つのサーボモーターが配置され、各指と釣り糸(釣り糸として使用される)のシステムを接続する。釣り糸は小型ながら、200ポンド(約100kg)以上の力に耐えられる。これはアーム全体の動きを制御する「腱」のようなものだ。
ユーザーが手を動かすと、8メガピクセルのカメラが画像を記録し、Raspberry Pi信号処理ボードに送信して、実際の動きに合わせてアームの動きを制御します。アーム内部にはテンショナーが内蔵されており、指のグリップ力を常に伸ばし、モーターギアの引っ張り力を軽減することで、連続動作によるモーターの過熱を回避します。
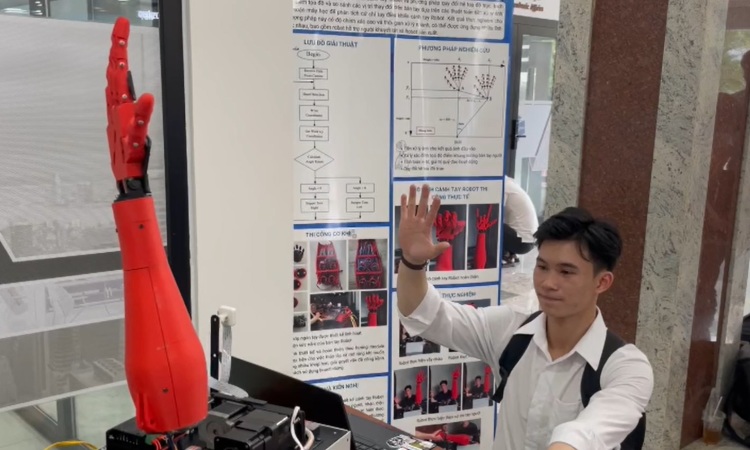
カオ・クオック・カーン氏がジェスチャーでロボットアームを操作するテストを行っている。動画:ハ・アン
作者によると、Raspberry Piボードを使用しているため、システムが遅延して動作し、ユーザーが合図してからハンドジェスチャーが実行されるまで約1秒かかるとのことです。Khanh氏は、この欠点を軽減するために、コマンドへの応答性が高いボードを完成させ、使用することで遅延を軽減できると説明しました。また、新しいロボットアームは指先から肘までの動きをシミュレートするため、2次元座標でのみ動作します。ロボットアームは指先から肩までの動作を完成する必要があります。3次元座標で動作することで、より複雑でリアルな動きを実現できるからです。「この製品は、より高速かつ高感度に動作させるために、さらなる研究が必要です。このアームから、人間とインタラクトする完全なロボットへと発展する可能性があります」と、Khanh氏は最初の製品の将来について語りました。
ホーチミン市食品産業大学電気電子学部講師のトラン・ホアン氏は、この研究は画像処理を用いて人工知能を応用するものであり、従来のセンサーを用いたロボットアームの制御に取って代わる可能性があると評価しました。製品開発を通して、学生は機械設計スキルとマイクロコントローラプログラミングの両方を習得することができ、これは将来非常に役立つでしょう。
しかし、ホアン氏は、この製品の可動半径には限界があり、アームを360度動かしてより柔軟にするには、より多くのモーターを開発する必要があると述べました。「そのためには、学生たちはより小型のモーターを用いた研究を行い、電子部品を収容するのに十分なスペースを確保できるようにアームを再設計する必要があります。」

このロボットアームは、6月3日にホーチミン市食品産業大学の学生科学研究コンテストで発表された。写真:ハ・アン
電気電子工学の専門家であるチュオン・クアン・ヴィン准教授は、骨格と手のジェスチャーを認識するアルゴリズムを用いた製品は目新しいものではなく、リアルタイム処理速度がまだかなり遅いと述べた。ヴィン准教授は、ロボットが物体をリアルタイムで把持できるよう、アルゴリズムを最適化し、ハードウェアシステムをアップグレードして画像処理と手の骨格認識結果の提供に必要な速度を達成すべきだと提案した。
カーンさんの製品は、ホーチミン市食品産業大学科学技術学部が6月3日に主催した2022~2023年度学生科学研究コンテストで奨励賞を受賞した。
ハアン
[広告2]
ソースリンク




































































































コメント (0)