
I takt med att världen bevittnar explosionen av automatisering, robotik och artificiell intelligens (AI), blir sensorteknik och smarta interaktiva system grundpelare inom industri, tjänster och hälso- och sjukvård . Dessa innovationer förbättrar inte bara produktiviteten och optimerar kostnaderna, utan öppnar också upp för nya metoder för att förbättra livskvaliteten och gå mot hållbar utveckling.
Detta är innehållet som presenterades vid seminariet "Robotar och intelligent automation" som anordnades av VinFuture Foundation på morgonen den 4 december i Hanoi .
Diskussionen fokuserade på många framträdande aspekter inom robotikområdet: Humanoida robotar med social interaktionsförmåga, samarbetande robotar inom service och medicin, rehabiliteringsrobotsystem och heta frågor relaterade till AI-säkerhet och teknologisk etik. Detta innehåll återspeglar trenden att utveckla robotar mot humanism, säkerhet och hållbarhet.
Mjuka material: Grunden för flexibla robotar
Vid seminariet betonade professor Kurt Kremer – hedersdirektör för Max Planck-institutet för polymerforskning (Tyskland) att mjuka material öppnar en ny riktning för robotar tack vare deras flexibilitet, enkla tillverkning och miljövänlighet. Polymerer, som används flitigt eftersom de är billiga, finns i överflöd och kan justera sin hårdhet, utvecklas i riktning mot bättre bärförmåga och effektivare biologisk nedbrytning.
Nyckeln, säger han, är att dessa är "smarta" material som kan expandera eller ändra form när de utsätts för stimuli som temperatur, pH, tryck eller miljöförändringar. Med sin känsliga och snabba respons kan de manövrera ventiler, skapa mekaniska krafter eller bli mycket sofistikerade robotkomponenter.
. (Foto: Minh Son/Vietnam+)")
När polymerer kombineras till komplexa strukturer som geler eller "borstar" kan materialen ta sig an svåra mekaniska uppgifter, vilket hjälper till att producera mjuka ställdon för robotar att greppa mer försiktigt och exakt.
Många polymerer är också mycket ledande eller dielektriska, vilket öppnar upp möjligheter för organisk elektronik. Även om de inte kan konkurrera med kisel i hastighet, är de billigare, enklare att tillverka, inte beroende av sällsynta jordartsmetaller och har funnit tillämpningar i OLED-skärmar, vikbara telefoner och organiska solpaneler.
Professor Kremer menar att genom att kombinera alla tre elementen: mjukhet, responsivitet och elektroniska egenskaper, kan organiska material utvecklas till en "neuromorfisk" form som efterliknar nervsystemets anpassning. Detta anses vara grunden för framtida generationer av robotar som är flexibla, säkra och kostnadsoptimerade.
Ur ett tillämpningsperspektiv påpekade professor Ho Young Kim (Seoul National University, Korea) att robotar står inför stora utmaningar när de manipulerar mjuka material – en grupp material som förekommer överallt från kläder, mat, plastpåsar, elkablar till medicinska förnödenheter.
Traditionella robotar är optimerade för styva, formstabila föremål. Men mjuka material är helt annorlunda, sa han, till exempel när en robot håller i en t-shirt, bara genom att ändra grepppunkten, ändras formen på en tröja, skjortans yta kan vikas, skrynklas, vilket skapar otaliga komplexa parametrar.
")
Det som människor kan göra på några sekunder, som att kavla upp ärmar eller vika tvätt, är en enorm utmaning för robotar. Detta, sa han, är också paradoxen med modern AI: den kan lösa ekvationer och memorera enorma mängder data, men den har svårt att hantera grundläggande hushållssysslor.
I sin forskning utvecklade hans team ett gripsystem med elastiska membran som möjliggör stabil lyftning av enskilda tyger, och som till och med kan plocka upp mjuka biologiska föremål som apelsinskal.
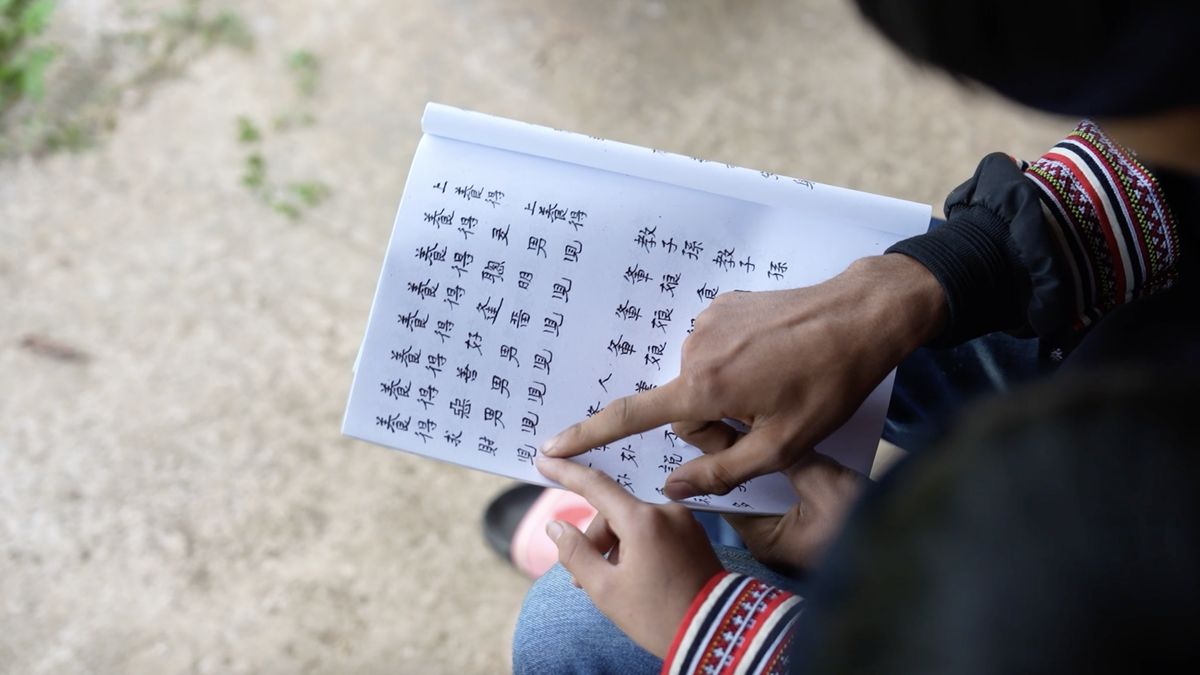
Baserat på denna teknik skapade forskargruppen en maskin som utför numreringssteget – ett viktigt steg som tidigare bara människor kunde göra. Maskinen kan upprepa operationen många gånger utan att göra några misstag.
För att lösa problemet med mjuka material måste robotar, enligt honom, övervinna fyra utmaningar: förmågan att korrekt uppfatta materialens tillstånd; en tillräckligt känslig mekanisk hand; ett flexibelt styrsystem inför kontinuerliga förändringar; och förmågan att expandera för massproduktion. Bearbetning av mjuka material, avslutade han, är "dörren" för robotar att verkligen komma in i livet och produktionen.
Humanoida robotar och krav på fysisk intelligens
Professor Tan Yap Peng – ordförande för VinUni – sa att humanoida robotar håller på att bli en trend eftersom de enkelt kan operera i mänskliga miljöer. Det förutspås att världen år 2050 kan ha minst en miljard robotar som lever och arbetar med människor.
Den stora utmaningen är att dagens robotar oftast är programmerade för en enda uppgift. För att gå mot multitasking-robotar måste tekniken lära sig av stora språkmodeller: robotar som tränas på stora mängder videodata för att bygga upp förmågan att förstå den fysiska världen.
")
Men att gå från språk till vision till handling är en lång resa. Robotar behöver observera, resonera och ta emot instruktioner – färdigheter som förblir öppna.
Professor Tan Yap Peng gav också exempel på modeller som "Fysisk intelligens typ noll" som gör det möjligt för robotar att ta emot bild-, video- och taldata och utföra olika robotstyrningsåtgärder. Men med komplexa uppgifter som att vika kläder eller tvätta behöver robotar fortfarande finjustering och illustrativa data från experter.
Den största begränsningen, enligt professor Tan, är att robotar inte har samma minne som människor. Därför föreslog hans team att lagra "minnesfragment" från expertdemonstrationer, vilket gör det möjligt för robotar att söka efter och använda liknande upplevelser när de ställs inför nya uppgifter. Denna metod minskar fel och ökar förmågan att slutföra långa uppgifter.
Samtidigt måste robotar också lösa problem relaterade till energi, manuell fingerfärdighet, självdiagnos, säker drift och efterlevnad av etiska standarder. Enligt professorn är detta stora problem som behöver lösas under de kommande 30–50 åren.
 och vetenskaplig chef (CSO) för VinMotion. (Foto: Minh Son/Vietnam+)")
Ur ett industriellt perspektiv sa Dr. Nguyen Trung Quan, biträdande professor i flyg- och rymdteknik vid University of Southern California (USC) och Chief Scientific Officer (CSO) för VinMotion, att när man går från digital AI till fysisk intelligens blir data den mest knappa faktorn. Världen övergår starkt till universalrobotar eftersom de ger förmågan att agera – något som renodlat digital AI inte kan göra.
Många prognoser visar att marknaden för humanoida robotar och fysisk intelligens kan nå 10 000 miljarder USD under de kommande 10 åren, mot bakgrund av arbetskraftsbrist i många länder.
Men enligt Dr. Quan står fysisk intelligens inför en "ond cirkel mellan hönan och ägget". Bra AI kräver riktiga data, riktiga data kräver robotar för att fungera, och robotar som fungerar effektivt behöver stark AI.
”VinMotion närmar sig ’människan-i-loopen’-modellen genom att föra in robotar i verkliga miljöer, vilket gör det möjligt för människor att övervaka, stödja och reagera när robotar stöter på svåra situationer. Denna modell garanterar säkerhet och hjälper AI att lära sig snabbare, vilket skapar en plattform för skalning”, sade Quan.
Enligt honom kräver humanoida robotar tre faktorer: bra hårdvara, bra programvara/AI och ett säkert driftsättningssystem. Vietnam är ett av de länder som kan uppfylla alla dessa tre faktorer samtidigt.
Källa: https://www.vietnamplus.vn/ky-nguyen-robot-va-thach-thuc-lon-tren-hanh-trinh-buoc-vao-doi-song-con-nguoi-post1080970.vnp

![[Foto] Cat Ba - Grönt öparadis](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F04%2F1764821844074_ndo_br_1-dcbthienduongxanh638-jpg.webp&w=3840&q=75)
























































![[VIMC 40 dagar av blixtsnabbhet] Da Nang Port: Enighet - Blixtsnabbhet - Genombrott till mållinjen](https://vphoto.vietnam.vn/thumb/402x226/vietnam/resource/IMAGE/2025/12/04/1764833540882_cdn_4-12-25.jpeg)














































Kommentar (0)