
Cao Quoc Khanh, ein Student der Ho Chi Minh City University of Food Industry, hat einen Roboterarm entwickelt, der grundlegende menschliche Armbewegungen nachahmt und in Fabriken und zur Unterstützung von Patienten eingesetzt werden kann.
Der Roboterarm wurde Ende letzten Jahres von Khanh, einem Studenten im letzten Studienjahr der Steuerungs- und Automatisierungstechnik an der Fakultät für Elektrotechnik und Elektronik, entwickelt. Er soll Menschen bei Aufgaben in rauen Umgebungen wie Hochtemperaturbereichen, Bereichen mit giftigen Gasen usw. in Laboren oder Fabriken unterstützen. Das Produkt kann auch Menschen mit Behinderungen helfen, die sich in ihren Räumen nicht bewegen können. Sie können den Roboterarm nutzen, um die Ausgabe von Speisen und Getränken zu steuern.
Der von Khanh entwickelte Roboterarm hat eine Knochenform ähnlich einem menschlichen Arm und besteht aus 3D-gedrucktem PLA-Kunststoff (Polymilchsäure).
Khanh sagte, dass PLA-Kunststoff hart, langlebig und günstig sei und so zu einer stabileren und flexibleren Armbewegung beitrage. Im Arm sind fünf Servomotoren angeordnet, die die Finger mit einem System von Angelschnüren verbinden. Diese sind zwar klein, können aber einer Kraft von über 200 Pfund (entspricht fast 100 kg) standhalten. Dies dient als „Sehne“ zur Steuerung der gesamten Armbewegung.
Wenn der Benutzer seine Hand bewegt, zeichnet die 8-Megapixel-Kamera das Bild auf und überträgt es an die Raspberry Pi-Signalverarbeitungsplatine, um die Armbewegung entsprechend der tatsächlichen Außenbewegung zu steuern. Im Arm befinden sich außerdem Spanner, die dafür sorgen, dass die Griffkraft der Finger stets gestreckt bleibt. Dadurch wird die Zugkraft des Motorgetriebes reduziert und eine Überhitzung des Motors bei Dauerbetrieb vermieden.
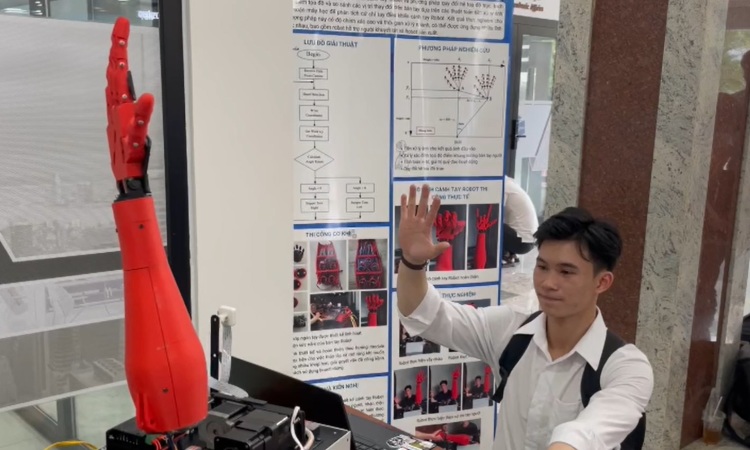
Cao Quoc Khanh testet die Steuerung eines Roboterarms mit Gesten. Video : Ha An
Der Autor erklärte, dass das System aufgrund der Verwendung des Raspberry Pi-Boards mit einer Verzögerung arbeitet und etwa eine Sekunde benötigt, um Handgesten nach dem Benutzersignal auszuführen. Um diesen Nachteil zu minimieren, sagte Khanh, dass die Fertigstellung zeitaufwändig sei und ein Board verwendet werden müsse, das besser auf Befehle reagieren kann, was die Verzögerung reduzieren würde. Darüber hinaus simuliert der neue Roboterarm Bewegungen von den Fingerspitzen bis zum Ellenbogen und arbeitet daher nur auf zweidimensionalen Koordinaten. Der Roboterarm muss für die Bewegung von den Fingern bis zur Schulter fertiggestellt werden, da er bei Bewegungen auf dreidimensionalen Koordinaten komplexere und realistischere Bewegungen ausführen kann. „Dieses Produkt bedarf weiterer Forschung, um es schneller und sensibler zu machen. Ausgehend von diesem Arm kann sich ein kompletter Roboter entwickeln, der mit Menschen interagiert“, sagte Khanh über die Zukunftspläne seines ersten Produkts.
Master Tran Hoan, Dozent an der Fakultät für Elektrotechnik und Elektronik der Ho-Chi-Minh-Stadt-Universität für Lebensmittelindustrie, erklärte, dass es sich um eine Forschungsrichtung handele, die Bildverarbeitung zur Anwendung künstlicher Intelligenz einsetze und so herkömmliche Sensoren zur Steuerung von Roboterarmen ersetzen könne. Bei der Herstellung von Produkten erwerben die Studierenden sowohl mechanische Konstruktionsfähigkeiten als auch Erfahrung in der Mikrocontroller-Programmierung, was für die Zukunft sehr nützlich sei.
Herr Hoan erklärte jedoch, dass der Bewegungsradius des Produkts begrenzt sei und die Entwicklung weiterer Motoren notwendig sei, damit sich der Arm um 360 Grad bewegen und flexibler werden könne. „Dazu müssen die Studierenden den Einsatz kleinerer Motoren erforschen und den Arm so umgestalten, dass genügend Platz für elektronische Komponenten bleibt.“

Der Roboterarm wurde am 3. Juni beim wissenschaftlichen Forschungswettbewerb für Studenten der Ho Chi Minh City University of Food Industry vorgestellt. Foto: Ha An
Außerordentlicher Professor Dr. Truong Quang Vinh, Experte für Elektrotechnik und Elektronik, erklärte, dass das Produkt mit dem Algorithmus zur Erkennung von Skelett und Handgesten nicht neu sei und die Echtzeit-Verarbeitungsgeschwindigkeit noch recht langsam sei. Er schlug vor, der Autor solle den Algorithmus optimieren und das Hardwaresystem verbessern, um die Bildverarbeitung zu erleichtern und Erkennungsergebnisse für das Handskelett zu liefern, damit der Roboter Objekte in Echtzeit greifen könne.
Khanhs Produkt gewann am 3. Juni den Förderpreis im wissenschaftlichen Forschungswettbewerb für Studenten für das Schuljahr 2022–2023, der von der Abteilung für Wissenschaft und Technologie der Ho-Chi-Minh-Stadt-Universität für Lebensmittelindustrie organisiert wurde.
Ha An
[Anzeige_2]
Quellenlink







































































































Kommentar (0)