
世界が自動化、ロボット工学、人工知能(AI)の爆発的な発展を目の当たりにする中、センサー技術とスマートインタラクティブシステムは、産業、サービス、そしてヘルスケアの柱となりつつあります。これらのイノベーションは、生産性の向上とコストの最適化だけでなく、生活の質を向上させ、持続可能な開発へと向かう新たなアプローチを切り開きます。
これは、12月4日午前にハノイでVinFuture Foundationが主催した「ロボットとインテリジェントオートメーション」セミナーで発表された内容です。
議論は、ロボット工学分野における多くの重要な側面に焦点を当てました。社会的インタラクション機能を備えたヒューマノイドロボット、サービスおよび医療における協働ロボット、リハビリテーションロボットシステム、そしてAIの安全性と技術倫理に関する重要な課題などです。これらの内容は、ヒューマニズム、安全性、持続可能性に向けたロボット開発の潮流を反映しています。
ソフトマテリアル:柔軟なロボットの基礎
セミナーでは、マックス・プランク高分子研究所(ドイツ)名誉所長のクルト・クレーマー教授が、ソフトマテリアルは柔軟性、製造の容易さ、そして環境への配慮という点で、ロボットの新たな方向性を切り開いていると強調しました。安価で豊富に存在し、硬度を調整できることから広く利用されているポリマーは、耐荷重性の向上とより効果的な生分解性を目指して開発が進められています。
彼によると、鍵となるのは、これらの材料が温度、pH、圧力、環境変化などの刺激にさらされると膨張したり形状を変えたりできる「スマート」な材料であるという点だ。その高感度かつ高速な反応により、バルブを操作したり、機械的な力を生み出したり、あるいは高度に洗練されたロボット部品に利用したりすることができる。
。(写真:ミン・ソン/ベトナム+)")
ポリマーをゲルや「ブラシ」のような複雑な構造に組み合わせると、その材料は難しい機械的作業を引き受けることができ、ロボットがより優しく正確に掴むためのソフトアクチュエーターの製造に役立ちます。
多くのポリマーは導電性や誘電性にも優れており、有機エレクトロニクスの可能性を広げています。速度面ではシリコンに匹敵するものの、より安価で製造が容易で、希土類元素を必要としないため、OLED、折りたたみ式スマートフォン、有機太陽電池などに応用されています。
クレマー教授は、柔らかさ、応答性、電子特性という3つの要素をすべて組み合わせることで、有機材料は神経系の適応を模倣した「ニューロモルフィック」な形態へと進化できると考えています。これは、柔軟性、安全性、そしてコスト最適化された次世代ロボットの基盤となると考えられています。
応用の観点から、ホ・ヨン・キム教授(韓国、ソウル国立大学)は、ロボットは、衣類、食品、ビニール袋、電線から医療用品まで、あらゆる場所に存在する柔らかい素材を扱う際に大きな課題に直面していると指摘しました。
従来のロボットは、硬くて形状が安定した物体に最適化されています。しかし、柔らかい素材は全く異なると彼は言います。例えば、ロボットがTシャツを掴む場合、掴む位置を変えるだけでシャツの形状が変化し、表面が折り畳まれたり、しわになったりするなど、無数の複雑なパラメータが生み出されます。
")
袖をまくったり洗濯物を畳んだりといった、人間が数秒でこなせることは、ロボットにとっては大きな課題だ。これは現代のAIのパラドックスでもあると彼は言う。AIは方程式を解き、膨大なデータを記憶できるが、基本的な家事を行うのが困難なのだ。
彼のチームは研究の中で、弾性膜を使用したグリッパーシステムを開発した。このグリッパーシステムにより、個々の布地を安定して持ち上げることができ、オレンジの皮のような柔らかい生物の物体も持ち上げることができる。
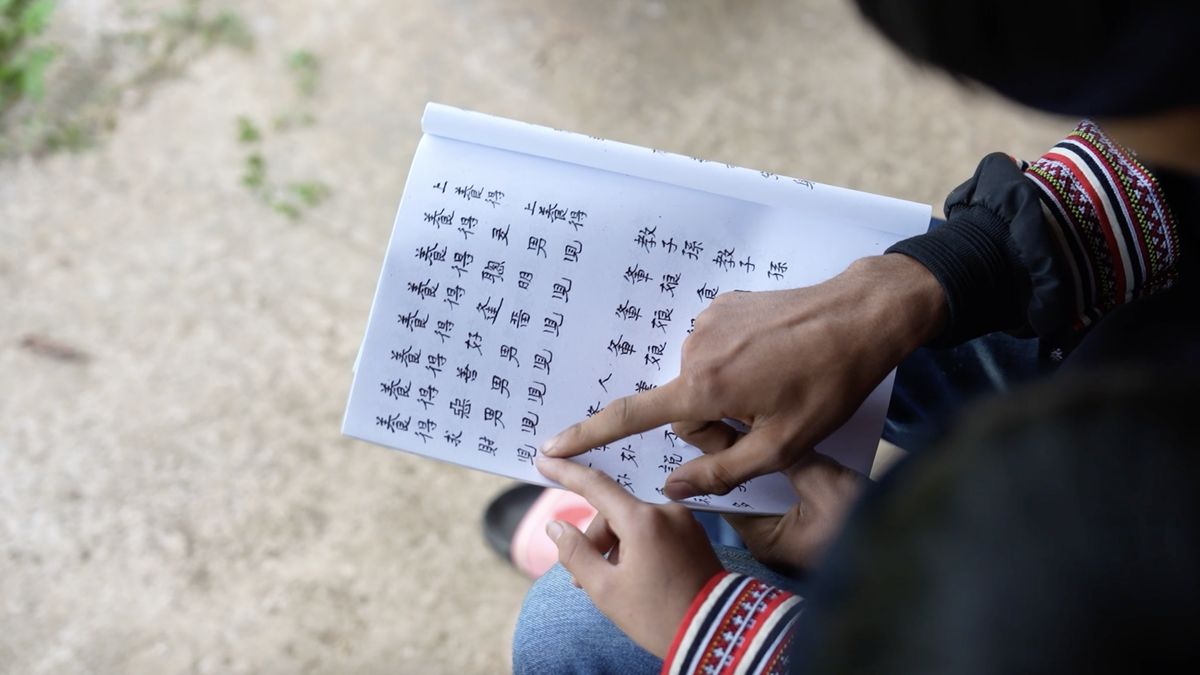
この技術を基に、研究チームは、これまで人間にしかできなかった重要な工程である番号付け作業を実行する機械を開発しました。この機械は、ミスなく何度も作業を繰り返すことができます。
彼によると、柔らかい素材の問題を解決するには、ロボットは4つの課題を克服する必要がある。それは、素材の状態を正確に認識する能力、十分に繊細な機械式ハンド、継続的な変化に対応できる柔軟な制御システム、そして大量生産のための拡張性である。そして、柔らかい素材の加工は、ロボットが真に生活と生産の世界に足を踏み入れるための「扉」であると結論付けた。
ヒューマノイドロボットと身体的知能の要件
VinUni学長のタン・ヤップ・ペン教授は、ヒューマノイドロボットは人間の環境で容易に動作できるため、トレンドになりつつあると述べました。2050年までに、 世界では少なくとも10億台のロボットが人間と共に生活し、働くようになると予測されています。
大きな課題は、今日のロボットが主に単一のタスク向けにプログラムされていることです。マルチタスクロボットへと進化するには、技術が大規模な言語モデルから学習する必要があります。つまり、ロボットは大量のビデオデータで訓練され、物理世界を理解する能力を身につけるのです。
")
しかし、言語から視覚、そして行動へと移行するには長い道のりがあります。ロボットは観察し、推論し、指示を受け取る必要がありますが、これらのスキルは未だ未開拓です。
タン・ヤップ・ペン教授は、「Physical Intelligence Type Zero」などのモデルの例を挙げ、ロボットが画像、動画、音声データを受信して様々なロボット制御動作を実行できるようにしました。しかし、衣類の折りたたみや洗濯といった複雑な作業では、ロボットは依然として専門家による微調整と説明データを必要とします。
タン教授によると、ロボットの最大の限界は、人間と同じ記憶力を持っていないことです。そこで、彼のチームは、熟練者のデモンストレーションから「記憶の断片」を保存することを提案しました。これにより、ロボットは新しいタスクに直面した際に、類似の経験を検索して活用できるようになります。このアプローチは、エラーを減らし、長時間のタスクを完了する能力を向上させます。
同時に、ロボットはエネルギー、手先の器用さ、自己診断、安全な操作、倫理基準の遵守といった課題も解決しなければなりません。教授によると、これらはすべて今後30~50年で解決すべき大きな課題です。
航空宇宙工学助教授であり、VinMotionの最高科学責任者(CSO)であるグエン・チュン・クアン博士。(写真:ミン・ソン/Vietnam+)")
産業界の視点から、南カリフォルニア大学(USC)航空宇宙工学助教授であり、VinMotionの最高科学責任者(CSO)であるグエン・チュン・クアン博士は、デジタルAIから物理的な知能へと移行する際には、データが最も不足する要素になると述べています。世界は汎用ロボットへと大きく移行しています。汎用ロボットは、純粋なデジタルAIでは実現できない行動能力をもたらすからです。
多くの予測によれば、多くの国で労働力不足が見られる中、今後 10 年間でヒューマノイドロボットと物理的知能の市場規模は 10 兆米ドルに達する可能性があるとされています。
しかし、クアン博士によると、物理的知能は「鶏が先か卵が先かという悪循環」に直面しており、優れた AI には実際のデータが必要であり、実際のデータにはロボットの動作が必要であり、効果的に動作するロボットには強力な AI が必要だという。
「VinMotionは、ロボットを実際の環境に持ち込むことで『ヒューマン・イン・ザ・ループ』モデルにアプローチし、ロボットが困難な状況に遭遇した際に人間が監視、支援、対応できるようにします。このモデルは安全性を確保し、AIの学習を加速させ、拡張のためのプラットフォームを構築します」とクアン氏は述べています。
彼によると、ヒューマノイドロボットには、優れたハードウェア、優れたソフトウェア/AI、そして安全な配備システムという3つの要素が必要だという。ベトナムは、これら3つの要素をすべて同時に満たすことができる国の一つである。
出典: https://www.vietnamplus.vn/ky-nguyen-robot-va-thach-thuc-lon-tren-hanh-trinh-buoc-vao-doi-song-con-nguoi-post1080970.vnp





![[写真] カットバ島 - 緑の楽園の島](/_next/image?url=https%3A%2F%2Fvphoto.vietnam.vn%2Fthumb%2F1200x675%2Fvietnam%2Fresource%2FIMAGE%2F2025%2F12%2F04%2F1764821844074_ndo_br_1-dcbthienduongxanh638-jpg.webp&w=3840&q=75)



































































































コメント (0)